3. Некоторые общие принципы управления большими системами
1. Трудность задачи управления живой системой
Мы уже говорили о том, что одна из существенных черт биологических систем - это их сложность. Рассмотрим ту живую систему, с которой мы никогда не расстаемся,- наше собственное тело. Если мы, максимально упростив реальную ситуацию, будем рассматривать человеческое тело просто как механическую систему с соответствующим числом шарниров (суставов), то окажется, что эта система имеет более ста степеней свободы. Мы успешно справляемся с задачей управления такой системой: ходим, бегаем, выполняем различные другие движения. В то же время в технических задачах управления приходится, как правило, распоряжаться не более, чем 2-3 параметрами. В теории регулирования разработаны методы, позволяющие успешно решать задачи, связанные с управлением такими относительно несложными системами. Однако эти методы становятся совершенно неэффективными, если мы переходим к системам с десятками и сотнями степеней свободы.
Следует обратить внимание на то, что при решении таких задач, как задача управления движениями нашего тела, весьма важен фактор времени. Если нам нужно избежать какой-либо опасности, скажем, отскочить от движущегося от нас автомобиля, то эту задачу (требующую участия десятков мышц, т. е. достаточно сложную) нужно не просто решить, но решить быстро. Другое соображение, опять же связанное с учетом времени, таково: количество различных положений (поз), которые может принять наше тело, настолько велико, что «перепробовать» все возможные для нас позы мы не смогли бы и за всю жизнь. Поэтому обучаться нужным для нас движениям (например, ходьбе) заведомо невозможно путем последовательного перебора всех возможных движений вообще. Следовательно, живые системы решают задачи построения движений и выработки новых их сочетаний какими-то собственными, весьма эффективными способами, Что же мы знаем по этому поводу?
2. Синергии
В физиологии движения хорошо известно наличие у организма так называемых «синергий», т. е. четко выраженной координации различных частей тела при тех или иных движениях. Мы не можем, даже если будем стараться, управлять теми степенями свободы, которые имеет наше тело, независимо. Например, для человека весьма затруднительно одновременно выполнять двумя руками вращательные движения так, чтобы одна рука совершала вращения с одной частотой, а другая с другой. Таким образом, при выполнении тех или иных движений происходит распадение имеющихся в нашем теле степеней свободы на согласованно управляемые «блоки». Тем самым реальное число независимых параметров, подлежащих регулированию, оказывается во много раз меньше, чем число степеней свободы, определяемое подвижностью суставов. Некоторые из этих «блоков» в нашем организме твердо зафиксированы, например, согласованность в движениях рук, о которой упоминалось выше,- это не результат обучения или привычки, а врожденное свойство. В других случаях, скажем, при выполнении таких действий, как катание на коньках и т. п., синергии являются следствием соответствующей тренировки.
Интересным примером синергии (природной, а не выработанной тренировкой) может служить так называемая дыхательная синергия. Она состоит в следующем. У спокойно стоящего человека при вдохе и выдохе происходит заметное смещение частей тела. Однако эти смещения никак не отражаются на положении центра тяжести тела в целом. Причина этого состоит в том, что при вдохе одновременно с отклонением туловища назад происходит отклонение таза вперед (при выдохе - картина обратная). Таким образом, смещения различных частей тела при дыхании не независимы, а согласованы между собой так, что они компенсируют друг друга (рис. 4). При некоторых мозговых заболеваниях эта синергия разрушается, и тогда центр тяжести стоящего человека колеблется в соответствии с ритмом дыхания.
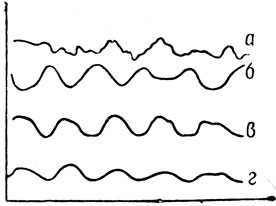
Рис. 4 Дыхательная синергия: а - колебания центра тяжести стоящего человека; б - колебания туловищного угла; в - колебания в тазобедренном суставе; г - ритмика дыхания
Мы уже упоминали, что одни синергии - врожденные, а другие возникают в результате обучения. Можно сказать, что обучение человека тем или иным движениям, например ходьбе на лыжах, плаванию и т. п. и состоит, собственно в отработке у него соответствующих синергий. Беспомощные движения человека, впервые попавшего в воду или только что ставшего на лыжи, - это неумение справиться в непривычных условиях с тем множеством степеней свободы, которое наше тело имеет.
При сложных движениях происходит последовательное чередование различных синергий. Таким образом, синергии - это те «готовые детали», из которых мы строим все наши движения.
Группировка параметров системы, имеющей много степеней свободы, в «блоки» и связанное с этим существенное уменьшение числа независимых параметров является, по-видимому, одним из общих и эффективных методов управления такими системами. А то обстоятельство, что эта группировка меняется в зависимости от выполняемой двигательной задачи, делает очень богатым и разнообразным запас тех действий, которые мы способны выполнять.
3. Многоуровневая организация системы управления
Итак, один из эффективных способов управления многопараметрическими системами состоит в том, чтобы группировать эти параметры в крупные блоки и управлять целыми такими блоками. Другой общий принцип управления такими сложными системами - распределение задачи между несколькими уровнями. Это означает следующее. Будем для определенности снова говорить о построении движений. Для того чтобы мы выполнили некоторое движение, скажем, взяли со стола чашку, нужна согласованная работа многих мышц, каждая из которых, в свою очередь, состоит из большого количества отдельных волокон - «двигательных единиц», управляемых соответствующими мотонейронами. Ясно, что, выполняя такое движение, мы вовсе не обдумываем работу каждой отдельной мышцы и тем более не управляем сознательно каждой двигательной единицей. Высший отдел нервной системы (большие полушария головного мозга) ставит лишь общую задачу - переместить чашку рукой из одного заданного положения в другое. Однако оно не контролирует действия отдельных двигательных единиц, подобно тому как командующий армией, ставя перед своими войсками некую общую задачу, не предписывает каждому солдату, что именно он должен делать в каждый момент сражения.
Детализация построения того или иного движения происходит на уровнях более низких, чем кора больших полушарий, в частности в различных отделах спинного мозга. Более того, в некоторых случаях (например, когда мы отдергиваем руку, случайно коснувшись горячего предмета) вся команда исходит от этих нижележащих уровней: мы еще, как говорится, «не успеем подумать», а рука уже отдернута.
Такое многоуровневое построение управления гораздо экономичнее, чем жесткое централизованное, при котором какой- то центральный орган точно предписывает действия каждой из составляющих систему частей. Действительно, в последнем случае сам управляющий орган оказался бы настолько сложным, что едва ли смог бы функционировать. Попробуйте-ка представить себе штаб армии, который разрабатывает в деталях поведение каждого солдата во время боя! Впрочем, еще труднее было бы представить себе живой организм, в котором все процессы, вплоть до внутриклеточных, определялись единым центром.
Идея многоуровневого управления живыми системами послужила отправным пунктом для следующих интересных экспериментальных работ, выполненных недавно советским физиологом М. Л. Шиком и его сотрудниками. Если у кошки перерезать головной мозг в области выше дыхательного центра, изолировав, таким образом, верхние отделы мозга от всей нижележащей нервной системы, то такое животное может дышать, но лишается способности к самостоятельным движениям и, будучи помещено на движущуюся ленту (тредбан), лежит на ней совершенно пассивно. Однако, если, приведя тредбан в движение, одновременно стимулировать электрическим раздражением определенную точку в области сделанного разреза, то животное начинает идти (или бежать, в зависимости от интенсивности раздражения), причем координация всех его движений достаточно близка к нормальной. Эти эксперименты можно интерпретировать следующим образом. Двигательная система кошки представляет собой сложный механизм, со многими степенями свободы. Но управление этим механизмом не имеет жесткой централизации. Координация движений лап и отдельных мышц задается на уровне, более низком, чем головной мозг, а «сверху» приходит лишь одно- параметрическое управление, определяющее интенсивность движения.
4. Принцип наименьшего взаимодействия. Локальное управление сложными системами
Для таких сложных биологических систем, как, например, целый организм, характерна структура, допускающая выделение в них отдельных, относительно независимых подсистем. Для каждой такой подсистемы совокупность всех остальных подсистем образует своего рода «внешнюю среду», в которой эта подсистема существует. Функционирование такой составной системы может быть организовано по «централизованному» принципу - каждой подсистеме предписывается определенное поведение. Мы уже говорили о неэффективности такого управления в сложных системах. Более соответствует реальному положению дел другая схема, которую можно назвать схемой локального управления. Это означает, что для подсистем, о которых идет речь, «сверху» устанавливаются лишь некоторые общие «правила взаимодействия», а каждая подсистема функционирует так, чтобы ее взаимодействие с остальными подсистемами (и с внешней средой) было в некотором смысле оптимальным.
Эти идеи были развиты несколько лет тому назад в работах И. М. Гельфанда и М. Л. Цетлина, которые выдвинули так называемый «принцип наименьшего взаимодействия», аналогичный известным в механике вариационным принципам. Согласно этому принципу каждая подсистема в живом организме функционирует так, чтобы ее взаимодействие со всей системой и с окружающей средой было возможно меньшим. В такого рода понятиях можно описать ряд физиологических явлений, например, таких, как синхронизация работы нервных или двигательных элементов и т. п. Вместе с тем следует подчеркнуть, что пока еще все соображения, связанные с принципом наименьшего взаимодействия, носят весьма неопределенный, предварительный характер, поскольку для живых систем мы, как правило, не можем точно указать, как это взаимодействие можно выразить математически.
Проиллюстрируем понятие локального управления на примере одной задачи, взятой, правда, не из биологии, а из техники. Представим себе, что у нас имеется n пар радиостанций и внутри каждой пары происходит передача и прием, а станции, относящиеся к разным ларам, друг с другом не связываются. Если эти пары радиостанций не очень удалены друг от друга, то они создают друг для друга помехи, затрудняющие, в той или иной степени, связь. Качество радиосвязи для каждой пары можно охарактеризовать отношением мощности сигнала к мощности шума. Если какая-то пара считает качество связи недостаточно хорошим, то она может увеличить мощность передачи. Однако это усилит помехи, создаваемые данной радиостанцией для других; они, в свою очередь, увеличат мощность передачи, а тем самым увеличат и помехи для той станции, о которой идет речь. Таким образом, эта станция может в результате увеличения мощности передачи не улучшить, а ухудшить свое положение. Можно, конечно, попытаться еще более увеличить мощность, но то же самое могут сделать другие станции. В системе возникнет лавинный режим нарастания мощностей, напоминающий некую веселую компанию, в которой каждый старается перекричать всех остальных, но все голоса тонут в общем шуме.
Возвращаясь к нашим радиостанциям, поставим следующий вопрос: какие же разумные способы регулирования мощностей, выводящие всю систему в целом на некоторый целесообразный устойчивый режим, можно предложить? Подчеркнем еще раз, что регулировка должна быть локальной, т. е. каждой станции известны лишь собственная мощность и собственное отношение сигнал/шум, а центра, в котором собирались бы все сведения и вырабатывались рекомендации для всей системы, не существует. Мы не будем здесь заниматься этой проблемой подробно, но укажем, что рассматриваемая задача допускает точное математическое решение. В принципе оно может быть основано на том, что на каждой станции оператор, произведя некоторое изменение мощности, должен нотой в течение определенного времени наблюдать, как это изменение отразилось на качестве его связи. Возникающие здесь вопросы и трудности довольно типичны для общей проблемы локального регулирования сложных систем.
Таковы некоторые общие принципы, с которыми мы сталкиваемся, рассматривая проблему эффективного управления сложными многопараметрическими системами.
|
ПОИСК:
|
При копировании ссылка обязательна:
http://biologylib.ru/ 'Библиотека по биологии'