Беседа вторая. Скорость, экономичность, маневренность
Природа не "изобрела" ни колеса в том виде, в котором мы его привыкли видеть, ни гребного винта, ни пропеллера, ни многих других устройств, широко применяемых ныне в различных видах транспорта. И все же ни одна отрасль техники так не обязана природе своим возникновением и стремительным развитием, количеством заимствованных у нее идей и методов, как современный транспорт во всем его многообразии.
Рис. 1. Нога человека при ходьбе описывает часть окружности
Щедрая, все знающая и все умеющая природа научила человека строить самолеты, сделала его крылатым, как птица, и быстрым, словно мысль. Она же научила его плавать и мастерски сооружать речные, морские и океанские корабли. И очень может быть, что идею изобретения колеса человеку также подсказала природа. Действительно, присмотритесь повнимательнее, как идет человек (рис. 1). Шагание, как говорят инженеры, - это "прерывистое качение". Человек же в свое время пошел дальше, он создал колесо, способное к непрерывному качению. Рушились царства, сменялись цивилизаций, но круглая форма колеса оставалась неизменной. Гениальное изобретение человека - колесо прочно вошло в нашу жизнь. Найдись ныне какой-нибудь озорник, который вздумал бы вдруг утащить у нас все колеса, и мы оказались бы в крайне затруднительном положении.
По сути, природа была первым политехническим институтом, в котором человек за многие века своей учебы приобрел "высшее" образование в разных областях транспорта. Но все это было давно. А сегодня? Можем ли мы, располагая быстроходными автомашинами, скоростными железнодорожными экспрессами, комфортабельными дизель-электроходами, стремительными воздушными лайнерами, еще чему-нибудь научиться у природы, позаимствовать из ее "инженерной" сокровищницы новые прогрессивные идеи, методы и средства для дальнейшего развития техники транспорта? Оказывается, можем, и вот тому пример.
Не так давно сотрудники Научно-исследовательской лаборатории механизации трудоемких работ Горьковского политехнического института разработали под руководством А. Ф. Николаева оригинальную снегоходную машину, в основе которой лежит принцип передвижения пингвинов по рыхлому снегу. Эти забавные птицы передвигаются весьма своеобразным способом - на брюхе, отталкиваясь от снега ластами, словно лыжники палками. Точно так же, лежа на снежной поверхности широким днищем и отталкиваясь от нее колесными плицами, легко скользит по рыхлому снегу новая снегоходная машина "Пингвин", развивая скорость до 50 км/час.
В таких машинах давно нуждаются многие отрасли народного хозяйства на Севере нашей страны; они окажут неоценимую услугу отважным советским исследователям Антарктиды во время их долгих и трудных походов по снежной пустыне, где обычные тягачи, тракторы и транспортеры не способны развивать достаточно большую скорость: эти машины образуют слишком глубокую колею, часто буксуют и увязают в мелкозернистом, несцементированном, рассыпчатом, как песок, снегу.
Не менее интересна и другая транспортная новинка, позаимствованная у природы.
Рис. 2. Кенгуру и схема перемещения прыгающего автомобиля
У любителей автомобильного спорта и шоферов-профессионалов есть давняя мечта - сесть за руль машины, которая с одинаковой легкостью мчалась бы по шоссе и грунтовой дороге, пересекала бы болота и пески, переносилась бы через канавы и овраги, ручьи и реки... Над осуществлением этой мечты уже не первый год работают ученые и конструкторы ряда стран. И вот, сравнительно недавно, известный инженер В. Турик разработал конструкцию первого в мире бесколесного прыгающего автомобиля. Идею этого изобретения В. Турику подсказал... кенгуру!
Да, да! Мы не оговорились, обычный кенгуру, каких немало водится в Австралии. Этих животных природа приспособила к быстрому бегу прыжками на задних конечностях. У крупных кенгуру длина прыжков достигает 10 м, высота - 3 м. Этих сумчатых млекопитающих практически не догонит ни одно из умеющих бегать животных, они могут даже поспорить с некоторыми автомобилями. И вот еще одна любопытная и чрезвычайно важная деталь: перемещаясь прыжками, кенгуру сохраняет очень высокую маневренность. Все специфические особенности "прыжкообразного" движения кенгуру нашли свое отражение в предложенной В. Туриком конструкции автомобиля-прыгуна (рис.2).
Новая машина может совмещать в себе одновременно функции трактора, автомобиля и тягача. При движении она не образует колею. И, наконец, самое главное - ей не нужна дорога. По высокой проходимости автомобиль-кенгуру можно сравнить лишь с будущими "автолетами". И хотя прыгающий автомобиль еще не создан, можно не сомневаться в том, что новый принцип движения найдет в ближайшее время успешное применение.
Одним из интересных и перспективных направлений современной бионики является разработка шагающих вездеходов. Над их созданием сейчас работают инженеры ряда стран, хотя идея построения таких систем сама по себе не нова.
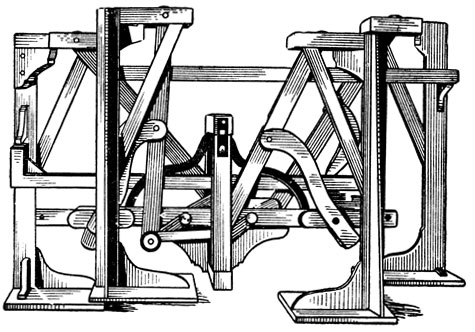
Рис. 3. 'Стопоходящая машина' П. Л. Чебышева
В конце прошлого века гениальный русский ученый П. Л. Чебышев построил "переступающую машину".
Модель оригинального механизма состоит из четырех, похожих на греческую букву "ламбда", ног. Механические ноги (только они и показаны на рис. 3) соединены так, что их кривошипы образуют обыкновенный параллелограмм, в углах которого находятся шарниры. Каждая нога "стопоходящей машины" - так назвал свое изобретение автор - представляла собой копию ноги кузнечика. Стоило рукой переместить корпус "стопохода" вперед или назад, как машина приходила в движение. Четыре ноги "стопохода" перемещались попарно: вторая с четвертой и первая с третьей. Внешне похожий на плоского кузнечика, "стопоход" шагал...
Однако "стопоходящая машина" не получила практического применения при жизни ее создателя. Не был реализован также патент на шагающий механизм, полученный незадолго до Октябрьской революций двумя талантливыми русскими изобретателями П. Орловским и Н. Гусевым.
Почему же теперь, спустя несколько десятилетий, инженеры вновь вернулись к изобретению П. Л. Чебышева, к патенту П. Орловского и Н. Гусева? Все дело в том, что практика требует создания все новых и новых конструкций вездеходов для работы в труднопроходимых местностях, в горах, песках, снегах, на болотах. Так уже бывало не раз, когда ученые, сталкиваясь с новыми сложными проблемами, возвращались к давно забытым идеям и изобретениям.
Американцы, например, стремятся использовать принципы ходьбы в машинах, предназначенных для военных целей. Над решением этой задачи по контракту, заключенному с Техническим управлением бронетанковых войск США, в настоящее время работает большая группа специалистов. Первый опытный образец бесколесной шагающей машины был создан учеными Мичиганского университета шесть лет назад. У него 8 ног, по 4 с каждой стороны. Ноги машины смонтированы на соединяющем брусе, который Чебышев называл корпусом. Концы ног соединены с лыжами. В сущности, это кривошипно-шатунный механизм, очень похожий на "стопоходящую машину". Разница заключается лишь в том, что великий русский механик и математик при создании своего "стопохода" был более дальновидным и предусмотрительным, нежели американские разработчики шагающей машины. При испытаниях опытный образец американской машины трясло и раскачивало, как корабль в сильный шторм. Причиной этого были возникшие в машине крутящие моменты и инерционные силы, которые конструкторам не удалось сбалансировать.
По-иному подошел к созданию шагающей машины инженер Юлиус Макерле. Он решил "научить" автомобиль ходить подобно тому, как это делает человек. На первый взгляд такая идея может показаться несостоятельной, ибо уже давно известно, что шагающая машина, точно повторяющая шагающий механизм человека, экономически невыгодна при больших скоростях передвижения. Совершая шаг, нога делает движение, похожее на качание маятника. Она получает ускорение и затем тормозится. Расчеты показывают, что до 3/4 энергии, расходуемой на шагание, затрачивается в фазе торможения.
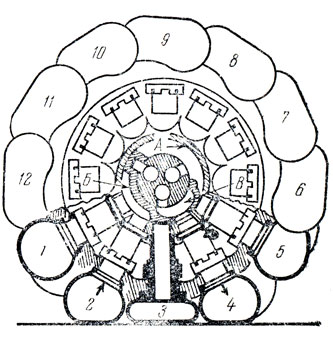
Рис. 4. Шагающее колесо. А - втулка колеса, в которой перемещается золотник, распределяющий давление воздуха в камерах. Б - полость золотника, обеспечивающая сообщение камер 1 и 2 с атмосферой. В - полость золотника, по которой воздух под давлением идет от компрессора в камеру 4
Однако для процесса ходьбы характерна одна важная особенность. Она заключается в том, что при каждом шаге нога отталкивается от земли в точке, находящейся несколько позади центра тяжести тела. В результате человек падает вперед до тех пор, пока он не выставит вперед другую ногу. Эта особенность и натолкнула Юлиуса Макерле на мысль создать так называемое "шагающее колесо".
Шагающее колесо имеет на своем ободе большое число пневматических камер. Давление воздуха в них непостоянно, и все они связаны с компрессором, который, изменяя давление в камерах, заставляет колесо перемещаться. Как это происходит, легче всего понять с помощью схемы, изображенной на рис. 4. Вкратце вся идея действия этих камер сводится к тому, что камера, находящаяся за точкой касания колеса с грунтом, раздувается воздухом таким образом, что колесо опирается на нее. При этом возникает такой же опрокидывающий момент, как и при ходьбе человека.
Двигателем машины с таким колесом служит агрегат, состоящий из мотора и компрессора. Раздувание камеры, находящейся позади точки касания колеса, сопровождается одновременным сжиманием камеры перед этой точкой, причем общий объем воздуха во всех камерах остается практически неизменным. Скорость вращения колеса прямо пропорциональна числу оборотов компрессора, иначе говоря, скорости подачи воздуха в раздуваемые камеры. Чем быстрее они будут наполняться, тем скорее будет перекатываться колесо.
Испытания опытной модели нового двигателя показали, что принцип, положенный в его основу, практически вполне себя оправдал. При избыточном давлении в 0,3 кг/см2 модель весом 4,3 кг передвигалась довольно успешно даже с дополнительной нагрузкой в 10 кг. Модель свободно преодолевала довольно серьезные для ее размеров препятствия и легко шла по очень плохим (с точки зрения автомобилиста) дорогам, например по глубокому песку.
Разумеется, маловероятно, что такое колесо появится на обычном автомобиле, однако на специального вида машинах, например строительных, экспедиционных, военных - словом, там, где необходимо иметь высокую проходимость и маневренность, шагающее колесо, несомненно, найдет широкое применение.
На очереди у творцов транспортных машин еще одна задача. Речь идет о том, что рано или поздно человек начнет осваивать пока еще загадочные просторы нашего древнего спутника - Луны, и для этого ему, естественно, понадобятся транспортные средства. Как же будут выглядеть транспортные машины, которые возьмут с собой лунные экспедиции?
Проектов лунных вездеходов разработано много. Предложено несколько вариантов танкеток на гусеничном ходу. Запроектированы лунные экипажи на квадратных и овальных, а также на гибких колесах. Существует проект настоящего механического монстра - трехосной машины на гигантских шарообразных колесах. Такие колеса, по мнению изобретателей, должны легко катиться по лунному "бездорожью". Имеется проект вездеходов в виде двойной винтовой спирали - так называемого винта Архимеда, - которая должна ввинчиваться в почву для передвижения по лунной поверхности. Наконец, разработан проект скачущего джипа - небольшой ракетной повозки, передвигающейся гигантскими скачками длиной в несколько десятков километров каждый.
Все эти проекты были разработаны с учетом существовавшей до последнего времени гипотезы, согласно которой поверхность Луны покрыта толстым слоем пыли. Однако результаты изучения лунных фотографий такое предположение не подтвердили, хотя возможность существования пылевых слоев в некоторых районах Луны полностью исключить нельзя. Детальный анализ снимков свидетельствует о сложной структуре лунной поверхности. Вероятно, наружный слой лунной породы толщиной в несколько сантиметров представляет собой интенсивно взрыхленное вещество. Оно покрывает практически всю поверхность Луны. Его шероховатая, сильно изъеденная структура напоминает начавший таять грязный весенний снег. Этот слой неоднороден. Вместе с мельчайшими частицами размерами в доли миллиметра встречаются более крупные куски пород сантиметровой и дециметровой величины. По подсчетам ученых, несущая способность поверхностного слоя Луны равна 1 - 10 кг/см2, что составляет примерно 1/100 - 1/1000 несущей способности массивной базальтовой породы. Из этих расчетов следует, что поверхность Луны достаточно прочна.
Учитывая новые данные о лунной поверхности, добытые за последние годы советскими и американскими автоматическими станциями, многие специалисты ныне все больше склоняются к мысли, что лунные вездеходы следует ставить не на колеса, а на ноги в самом прямом, буквальном смысле этого слова. Ноги лучше колес. Не повсюду, конечно, но в горах, в песках, среди ледовых торосов они убедительно доказали свое преимущество. Оправдают они себя и на Луне.
У кого же поучиться конструированию шагающей техники, с которой придется работать в необычайно трудных "лунных условиях"?
И снова беспокойная, вечно ищущая мысль человека обращается к живой природе. К кому же именно?
Не так давно внимание ученых привлек обыкновенный паук. Их заинтересовало, как этот представитель членистоногих ходит и довольно быстро бегает, имея длинные лапки, практически лишенные мышц.
Какая же сила движет лапки паука? Зоологи Кембриджского университета Парри и Браун установили, что эта движущая сила имеет гидравлическое происхождение. Значит, движение лапок паука осуществляется посредством своеобразного "гидравлического привода", жидкостью для которого служит кровь.
Произвели киносъемку и с ее помощью установили, что природа действительно наградила пауков чудесным гидроприводом. Если паук вытягивает лапки, гидропривод повышает в них давление крови до такой степени, что отвердевают их щетинки, и, наоборот, при сгибании конечностей гидропривод уменьшает в них давление крови.
В состоянии покоя давление крови в организме паука, как показали произведенные замеры, лишь на 0,05 атм выше давления окружающего воздуха. Но в момент прыжка животного оно мгновенно повышается на 0,5 атм! "Искусственная гипертония" служит тем источником энергии, которая позволяет пауку ставить "мировые рекорды" в прыжках. Так, например, европейские пауки-прыгуны берут высоту, превышающую в десятки раз (!) размеры их тельца.
Итак, уникальный гидропривод паука - это та биологическая система, которая может послужить образцом для создания компактного, легко управляемого, неприхотливого в эксплуатации лунного вездехода повышенной проходимости и маневренности. Большая скорость для лунной экспедиционной машины ни к чему, здесь важно другое - уверенное прохождение по любой местности. Длинные голенастые ноги будущего "лунного паука" нигде не увязнут, легко перешагнут трещины, одолеют самые крутые подъемы. И еще одно очень важное качество такой космической машины - затраты энергии на преодоление больших расстояний будут невелики.
Можем ли мы сегодня точно воспроизвести гидросистему паука? Пока нет, ибо ни биологи, ни инженеры не знают самого главного - каким образом пауки добиваются мгновенного изменения кровяного давления, как они автоматически регулируют его в сосудах. Но первый практический шаг на пути к созданию такой искусственной системы уже сделан.
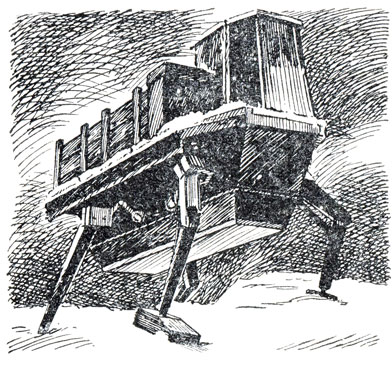
Рис. 5. Экспериментальный 'лунопроходец'
По сообщениям американской печати, одна фирма в прошлом году разработала проект машины, которая по внешнему виду и способу передвижения напоминает паука. "Металлический паук", которого мы видим на рис. 5, имеет четыре шарнирные "ноги" длиною более 2 м каждая. "Ноги" несут кабину, в которой находится человек. Водитель с помощью рычагов, прикрепленных к его рукам, ногам и торсу, управляет перемещением кабины. При этом он пользуется услугами серводвигателей, которые точно воспроизводят все его движения и увеличивают прилагаемую мышечную силу во много раз. Ноги водителя управляют "задними ногами" "металлического паука", руки - его "передними ногами". При остановке машина "становится на колени", опуская кабину на грунт. Чтобы стать водителем "металлического паука", не нужны курсы - таким шоферам достаточно пятиминутного обучения.
Такая машина будет, как полагают ее создатели, идеальным средством для передвижения по бездорожью Луны или других планет. Груз в 200 кг она сможет переносить по пересеченной местности со скоростью около 10 км/час. Способность передвигаться на согнутых ногах очень расширит приспособительные возможности "лунного паука". Он сможет легко преодолевать подъемы в 45°, в наиболее труднопроходимых местах идти лучше собачьей упряжки, не говоря уже об обычных вездеходах, а тем более о колесных машинах. Пока создана только упрощенная модель шагающего лунного вездехода. Ей еще очень далеко до такой совершенной биологической системы, какой является паук. Но когда бионики познают тайну механизма гидропривода паука и воплотят ее в металл, шагающий вездеход станет замечательным помощником космонавтов в исследованиях неизвестных нам миров.
Попробуем представить себе, как будет выглядеть будущий "лунный паук" - вездеход. Кабина космонавтов герметична и имеет отсек, служащий шлюзом для выхода космонавтов на поверхность Луны. С помощью специальных манипуляторов космонавты могут доставать образцы пород с поверхности Луны, не покидая кабины. Для непосредственных наблюдений за лунной поверхностью передвижная лаборатория снабжена двумя окнами. Из-за отсутствия на Луне рассеянного света предметы, находящиеся в тени, остаются невидимыми. Поэтому "лунный паук" оснащен мощными прожекторами. В системах управления и навигации лаборатории широко используется телевизионная система. С ее помощью будут проводиться исследования лунной поверхности. Но самое главное - ученые наземного центра управления лунной экспедицией смогут видеть на экранах телевизоров то же, что видят космонавты, и смогут контролировать их работу, а в случае необходимости - давать советы относительно маневров лаборатории, исследования различных объектов и т. д.
Подвижная лаборатория, согласно существующим проектам, будет доставлена на Луну заблаговременно (до высадки космонавтов) непилотируемым космическим аппаратом. Лунная кабина с космонавтами на борту совершит впоследствии посадку вблизи лаборатории; при помощи дистанционного управления последнюю приблизят к лунной кабине, и космонавты перейдут в нее.
Теперь - за работу.
Луна создана из того же "теста", что и Земля, из тех же химических элементов. И недра ее таят колоссальные запасы полезных ископаемых. Лунные геологи откроют богатые месторождения серы в трещинах вулканов. Там возможны скопления вулканических пород, богатых свинцом, цинком, хромом и другими промышленно ценными элементами. Размеры нашего соседа достаточно внушительны, и надо полагать, что в его недрах сформировались и алмазы. Когда-нибудь огромный лунный бриллиант заблестит в руках космонавта-геолога...
Вместе с будущими исследователями Луны и других планет от биоников ждут новых машин и покорители "космоса № 2" (так иногда называют земные недра).
Общеизвестен миф, согласно которому при дележе вселенной между богами подводное царство досталось Нептуну, подземное - Плутону. У входа в свои владения сумрачный Плутон поставил громадного трехглавого пса Цербера. Свирепый страж должен был оберегать от простых смертных тайны обиталища теней. Но не тут-то было. Нашелся смельчак - это был знаменитый силач Геркулес, - который победил страшное чудовище и вступил в единоборство с Плутоном. В этом античном мифе отражены наивные представления той эпохи о таинственном мире, расположенном у нас под ногами, и мечты о его покорении человеком.
Минули тысячелетия. На смену мифам, легендам и сказкам пришли научные представления геологии и геофизики. В поисках угля и урана, золота и алмазов человек с помощью построенных им машин вдоль и поперек изрыл покров царства Плутона гигантскими коридорами. Все глубже и глубже ввинчиваются в землю стальные сверла, снабженные алмазными "зубами". Более далекие от поверхности складки земной коры геофизики инспектируют волнами искусственных землетрясений, отзвуки которых воспринимаются чувствительными приборами - сейсмографами. Изучение выброшенных вулканами газов, паров и лавы, определение их состава и относительного содержания разных химических элементов дополняет наши сведения о строении земных недр. И тем не менее подземный мир до сих пор окутан покровом таинственности.
Что мы знаем о резиденции Плутона? В сущности, очень мало. Спустившись на дно глубочайшей шахты мира, вы очутитесь всего в 2,5 км от поверхности земли. Втрое глубже удалось проникнуть бурильщикам нефтяных скважин. Таким образом, в масштабах нашей планеты досконально изученный слой земной коры не превышает по своей толщине слоя краски на глобусе. А дальше - неизвестность. "Космос № 2" - пока еще белое пятно в науке.
Не потому ли писатели-фантасты так оседлали неисчерпаемую тему покорения "подземного космоса"? Они давно уже пробурили Землю насквозь во многих местах с помощью "ракеты-бура" (раскаленной струи газа с температурой более 3000° Ц), специальных ампул со взрывчаткой, подземохода с атомным реактором и т. п.. Однако в реальной жизни дело с землепроходными машинами обстоит несравненно хуже, чем на страницах научно-фантастических романов и повестей.
Подавляющее большинство применяемых ныне землепроходных машин не удовлетворяет потребителей своей производительностью, эксплуатационной надежностью и другими параметрами. Можно без преувеличения сказать, что землепроходных машин, достаточно простых, удобных и прочных, к сожалению, пока еще нет. Они существуют лишь в живой природе. Здесь, если внимательно присмотреться, можно увидеть не одну "землеройную машину", доведенную в процессе эволюции после многовекового отбора до самой высокой степени совершенства. Эти живые "землеройные машины" и служат ныне объектом изучения биоников.
Для копирования в технических системах наибольший интерес представляют приспособления, которыми снабжены личинки почвообитающих насекомых для прокладывания ходов в почве. Природа наделила их хорошо развитым аппаратом для рыхления или раздвигания частиц грунта и специальными приспособлениями для фиксации положения тела.
У одних видов рыхлящие органы располагаются на переднем конце тела и работают как клин и отбойный молоток (при этом отгребание измельченного субстрата осуществляется другими органами); у других - рыхлящий и отгребающий аппараты объединены в систему типа сложного скребка, действующего как одно целое, что характерно для личинок и ряда насекомых с гипогнатическим расположением ротового аппарата, а также для личинок, обитающих в почве или древесине (роль скребка у них играет ротовой аппарат и нижняя поверхность головы). Раздвигание частиц грунта производится либо гидравлическим способом, либо с помощью расширенных, ножницеобразно двигающихся челюстей; функции опорных приспособлений для фиксации положения тела выполняют либо одно или два острия, расположенных на заднем конце тела в плоскости приложения сил рыхлящего аппарата, либо значительное число подушковидных образований, покрытых множеством мелких шипов (эти образования тесно прижимаются к стенкам хода, точно повторяя их неровности).
Тщательное изучение приспособлений, которыми снабжены личинки насекомых для прокладки ходов в почве, и их моделирование может оказать большую помощь при создании новых рыхлящих и движущихся под землей агрегатов (угольные комбайны, приспособления для кротового дренажа и др.).
Приведем еще один пример возможного моделирования оригинальной живой "землеройной машины". Речь идет о копировании весьма совершенного способа передвижения во влажном грунте червей приапулид. Эти крошечные беспозвоночные животные (длиной 10 - 15 мм), живущие неглубоко под морским дном, являются непревзойденными мастерами по прокладке каналов. В своих "туннельных работах" они используют преимущественно гидравлический способ передвижения. Основным буровым инструментом приапулид служит короткий и мощный, похожий на усеянный шипами кактус, выбросной хоботок (на нем размещено более 1500 шипиков). Тело червя снабжено небольшим количеством продольных и кольцевых мышц, а также специальными механизмами, препятствующими обратному движению приапулид в грунте. Технология прокладки туннеля такова. Упираясь в грунт, червь при помощи шипов хоботка пробивает во влажной почве ход, поначалу тонкий. Затем хоботком, раздувающимся поступающей из тела жидкостью, приапулида расширяет и обжимает ход. Расширив и обжав отверстие, червь подтягивается. В это время хоботок сжимается, убирается внутрь, и начинается следующий цикл проходки. При таком передвижении червь обнаруживает большую двигательную силу, в десятки раз превышающую его собственный вес. Ученые подсчитали, что червячок весом до 2 г развивает усилие, в 40 раз (!) превышающее его собственный вес. И вот еще что весьма любопытно. Зоологи полагают, что, вонзив с силой свой хоботок во влажный морской грунт, червь затем поворачивает хоботок на некоторый угол. Таким образом, хоботок с насаженными на него многочисленными шипами работает, как бур.
Ну разве не достойна подражания такая великолепная "гидравлическая машина" для прокладки каналов в грунте? Ведь ее механизм природа оттачивала веками!
Не останутся, конечно, бионики в стороне и от решения такой увлекательной проблемы, как создание подземного корабля для путешествия к центру Земли, для поисков неразведанных богатств - руд, нефти, алмазов. Недавно оригинальную конструкцию "подземо-хода" разработал советский инженер А. Требелев. При расчете своей машины он всесторонне изучил методы "работы" крота - признанного рекордсмена подземных проходок. Модель "железного крота" успешно прошла первые испытания.
Многое могут позаимствовать у природы и судостроители, это поможет им в коренном усовершенствовании существующих и создании новых средств водного транспорта. Ведь ни для кого не секрет, что под натиском более скоростных соперников водный транспорт постепенно утрачивает свои былые позиции. Достаточно сказать, что даже на трансконтинентальных линиях, где еще совсем недавно он считался монополистом, сегодня почти 65% пассажиров отдает, предпочтение авиации и лишь оставшиеся 35% путешествуют на борту океанских лайнеров. Это - закономерное явление: в то время как реактивные самолеты несут пассажиров со скоростями 800 - 900 км/час, могучие корабли меряют океан с "черепашьими" скоростями 50 - 60 км/час. Хороший клипер XIX века мало уступает по скорости самому современному океанскому лайнеру! И всему виной огромное сопротивление, которое испытывают погруженные в воду корпуса судов.
По мере роста скорости это сопротивление увеличивается сначала пропорционально ее квадрату, но затем растет быстрее - пропорционально третьей, четвертой и даже пятой степени скорости. Здесь уже нельзя говорить о борьбе за скорость путем увеличения мощности двигателей: для этого двигательная установка должна была бы занимать весь корабль. Правда, благодаря появлению подводных крыльев, поднявших корпуса судов над водной поверхностью, судостроителям удалось преодолеть заветный рубеж крейсерской скорости на воде, равный 100 км/час. Но корабли на подводных крыльях не до конца избавлены от контакта с водой, а главное, по мере роста размеров судов они заметно утрачивают свои высокие качества.
Неужели же ученые бессильны вырвать корабль из плена воды, победить в единоборстве со стихией, оказавшейся самой неподатливой? Нет, не бессильны!
Изучив особенности строения многих обитателей морей и океанов, обеспечивающие им высокие гидродинамические качества, человек может положить в основу конструкции различных плавающих аппаратов новые принципы. Сошлемся на факты.
После длительных наблюдений и исследований японский ученый профессор Тако Инуи сначала предположил, а затем опытным путем на специально изготовленной модели пассажирского парохода "Куренаи Мару" доказал, что грушеобразная форма головы кита более приспособлена к перемещению в воде, нежели ножевидная форма носовой части современных судов. Этим открытием не замедлили воспользоваться кораблестроители. Они построили океанское судно, напоминающее по своей форме кита. Первые же испытания показали, что по сравнению с обычными судами китообразный корабль весьма экономичен. Мощность его двигателей на 25% меньше, а скорость и грузоподъемность те же!
А вот еще один не менее поучительный пример. Одна из американских подводных лодок носит название "Скипджек". Форма корпуса подводной лодки в точности такая же, как у тунца (рис. 6). Конструкторам удалось добиться хорошей обтекаемости корпуса лодки и значительно повысить ее скорость, а главное - создать очень поворотливое судно. (Поворотливостью называют способность судна к быстрому изменению направления. Это очень важное свойство: ведь большому кораблю для разворота требуется описать полуокружность с радиусом по крайней мере в 4 - 5 длин корпуса.)
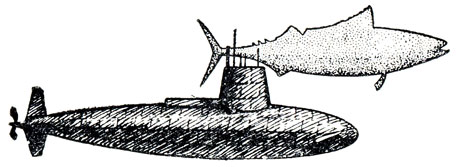
Рис. 6. Американская подводная лодка 'Скипджек'. Форма корпуса подводной лодки точно такая же, как и у быстроходной рыбы тунца
Очень часто мы говорим: "плавает, как рыба". Однако это определение весьма неточно, потому что рыбы плавают по-разному. Угри и миноги, например, большой скорости не развивают. Лучшими пловцами среди рыб считаются жители открытых морских просторов - лосось, акула, тунец, скумбрия. Лосось плывет со скоростью 5 м/сек (18 км/час), скорость акул равна 36 - 42 км/час. Не уступают им в скорости и некоторые морские млекопитающие. Кит, в частности, свободно плывет со скоростью 40 км/час. Но все эти рекорды побивает рыба-меч. С завидной легкостью она может развивать скорость, достигающую 130 км/час.
Откуда у рыбы такие силы? Или, быть может, здесь дело не столько в силе, сколько в особом умении?
Эту загадку пытался разгадать не один ученый в течение последних 40 - 50 лет. Были проделаны сотни экспериментов, но проверить, наглядно зафиксировать механизм движения рыбы в воде, установить характер образующихся водяных потоков, вычислить сопротивление, испытываемое движущейся в воде рыбой, силу тяги и мощность, развиваемые ею, так никому и не удалось. Общепризнанным до последнего времени было лишь одно - рыбы передвигаются под водой за счет движений хвоста и отчасти плавников.

Рис. 7. Завихрения жидкости, вызываемые перемещением в ней рыбы
И вот совсем недавно секрет скоростного перемещения рыб раскрылся самым неожиданным образом. По сообщению журнала "Мэшин Дезайн" был поставлен такой опыт. Рыб пустили в аквариум, наполненный не водой, а молоком. Молоко позволило проследить движения рыбы, возмущения жидкости, вызываемые перемещением в ней рыбы (рис. 7). Было установлено, что при каждом ударе хвоста образуется некоторое возмущение жидкости у жабр, а никак не у хвоста рыбы, как думали раньше. Но это еще не самое главное. Оказывается, что основная "движущая сила" возникает при колебательных движениях туловища рыбы. Животное скользит вдоль пришедших в движение слоев жидкости, и они на глазах превращаются в маленькие "водовороты" - завихрения с вертикальной осью вращения. Когда рыба скользит мимо этих возмущений, они закручиваются еще сильнее и увеличиваются в размере. Когда хвост рыбы по касательной проносится по завихрению, рыба как бы вбирает в себя всю накопившуюся там кинетическую энергию вращения. Создается впечатление, будто рыба плывет, отталкиваясь от водоворотов, что завихрения как бы выталкивают ее вперед. Правильность этих предположений была проверена еще на одном простом, но весьма остроумном опыте. Известно, что, если пойманную в реке рыбу бросить на берег, она будет подпрыгивать и биться о землю. Но вот вбили в доску два ряда гвоздей на одинаковом расстоянии друг от друга и положили рыбу между ними (рис. 8). И она "поплыла" посуху(!), отталкиваясь корпусом и хвостом от гвоздей, словно от водоворотов. Сходство прямо-таки поразительное!
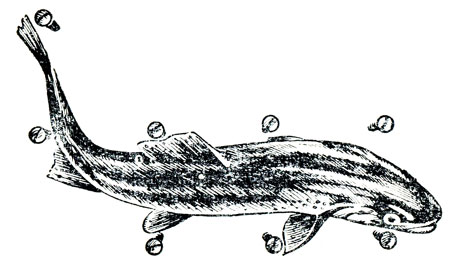
Рис. 8. Форель 'плывет' по доске, в которую в определенном порядке вбиты гвозди. Телом и хвостом рыба упирается в гвозди совершенно так же, как она 'опирается' в воде на завихрения
Ученые полагают, что установленные ими факты могут оказаться весьма полезными при конструировании кораблей. Уж очень заманчива перспектива создания судов, особенно подводных, способных двигаться в воде с легкостью рыбы. Эта проблема сейчас волнует не только кораблестроителей и гидродинамиков, но и биологов, биофизиков и биохимиков. Эта сложная и интересная задача увлекла и математиков.
Однако многие специалисты утверждают, что подводный аппарат, использующий принцип плавания рыб, не сможет развивать скорость, большую 30 узлов*. Опыты показали, что при любой попытке плыть быстрее коэффициент полезного действия плавательного аппарата начинает катастрофически падать.
* (Узел - мера скорости движения судов. Он равен 1 морской миле в час, т. е. 1,852 км/час. )
Как же быть? Выход из тупика подсказал дельфин.
Вы, вероятно, не раз, находясь на отдыхе у моря, видели, как быстро мчатся в волнах стаи дельфинов, развивая порой скорость до 30 узлов, т. е. примерно до 56 км/час. Долгое время ученые и инженеры не могли понять, каким образом дельфинам удается развивать столь большую скорость и без видимого усилия сопровождать быстроходные корабли в течение многих часов и даже дней, ни на шаг не отставая от них. Английский исследователь Грей установил, что для достижения скорости 30 узлов мышцы дельфинов должны быть примерно в 7 - 10 раз мощнее, чем на самом деле... За тщательные экспериментальные и теоретические исследования гидродинамического секрета дельфина принялись советские ученые под руководством академика В. В. Шулейкина. Еще в 1936 г. В. В. Шулейкин, В. С. Лукьянова и И. И. Стей на заседании Отделения математических наук Академии наук СССР сделали доклад о своих изысканиях, проводившихся в специальной башне. Ученые вывели формулы движения одиночного животного и целой стаи и установили, что при движении тело дельфина испытывает меньшее сопротивление со стороны воды, чем тело других обитателей моря. Они провели буксировочные испытания в бассейне и замерили сопротивление воды движению на модели. И тогда ученые столкнулись с почти необъяснимым законами механики фактом: точно воспроизведенная по весу и форме тела модель дельфина, которой сообщалась равная тяга, передвигалась по воде гораздо медленнее, чем живой дельфин.
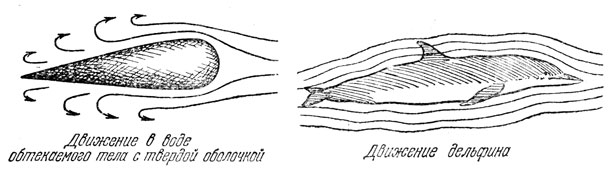
Рис. 9. Движение в воде обтекаемого тела с твердой оболочкой и движение дельфина
Позднее было замечено, что вокруг движущегося дельфина возникает лишь незначительное струйное (ламинарное) течение, не переходящее в вихревое (турбулентное), а плывущая подводная лодка, сходная по форме с дельфином, вызывает высокую турбулентность (рис. 9). На преодоление сопротивления воды при наличии турбулентности тратится около 9/10 движущей силы лодки.
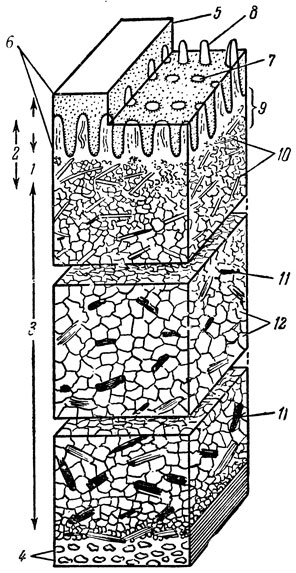
Рис. 10. Разрез дельфиньей кожи (схема). 1 - эпидермис; 2 - дерма; 3 - жировой пласт; 4 - подкожная мускулатура; 5 - верхний роговой слой эпидермиса; 6 - ростковый слой эпидермиса; 7 - ячейки росткового слоя; 8 - шиловидные сосочки дермы; 9 - подсосочковый слой дермы; 10 - пучки коллагеновых волокон; 11 - пучки эластиновых волокон; 12 - жировые клетки (по В. А. Соколову)
В чем же все-таки секрет необычайно высокой скорости движения дельфина? Оказывается, вся тайна "антитурбулентности" этого животного заключена в структуре его кожи (рис. 10). Эпидермис кожи очень эластичен (по своим свойствам он напоминает лучшие сорта автомобильной резины) и, как показали микроскопические исследования, состоит из двух слоев: тонкого наружного и лежащего под ним росткового, или шиповидного. В ячейки росткового слоя снизу по одному входят упругие сосочки дермы, напоминающие зубцы резиновой щетки для чистки замшевой обуви. Эпидермис и сосочки дермы сильнее развиты в тех местах, где ощущается большее давление воды при поступательном движении: в лобной части головы, на передних краях плавников и т. д. Ниже сосочков дермы располагается густое сплетение коллагеновых и эластиновых волокон, пространство между которыми заполнено жиром. Такое строение кожного покрова не только защищает организм дельфина от потерь тепла и повышает силу сцепления эпидермиса с дермой, но и действует, как превосходный демпфер, который вносит затухание в поток и предотвращает развитие турбулентности и срыв потока. Демпфирование достигается тем, что весьма эластичные жировые клетки подкожного слоя способны менять под давлением свою форму и затем восстанавливать ее. Кроме того, отличная буферность кожи достигается упругостью коллагеновых и эластиновых волокон.
Благодаря всем этим свойствам кожи поток, обтекающий тело дельфина, даже при большой скорости движения остается ламинарным, завихрения в нем не возникают. Этот принцип ламинаризации обтекающего потока воды ученые назвали "стабилизацией граничной поверхности распределенным гашением".
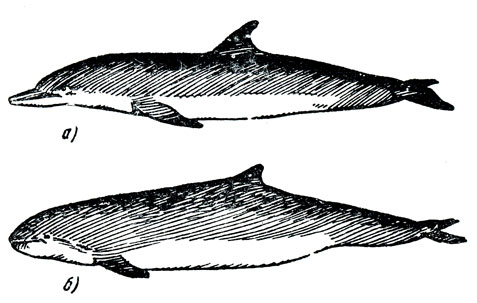
Рис. 11. Расположение гребней под тонким роговым слоем у обыкновенного дельфина (а) и у морской свиньи (6) (по П. Пурвесу)
Вот что пишет по этому поводу А. Г. Томилин.
"В 1963 г. английский зоолог Пурвес обратил внимание на расположение в коже китообразных дермальных гребешков, направленных вдоль струй потока. Для их изучения с поверхности кожи обыкновенного дельфина осторожно удаляли тонкую кожицу рогового слоя и рассматривали гребни под бинокулярной лупой. Оказалось, что на боках тела (кроме их нижней трети) гребни направлены косо вверх и назад под углом в 30° к продольной оси тела животного (рис. 11). На хвостовом стебле гребни были той же ориентации, что и на боках тела, а на грудных и спинном плавниках располагались горизонтально. Ученые предполагают, что расположение дермальных гребней в коже китообразных, способствует ламинаризации потока. У тихоходных морских свиней гребни располагаются иначе, чем у быстроходных дельфинов".

Рис. 12. В момент достижения дельфином критической скорости его кожа собирается в складки, которые сбивают вихревые потоки, возникающие вокруг движущегося тела (по А. Г. Томилину)
Ученые установили также, что на упругой коже китообразных и, в частности, дельфинов постоянно имеется тонкий слой специальной смазки, вырабатываемой особыми железами. Благодаря этому кожа дельфинов обладает гидрофобным, водоотталкивающим, свойством. Важность этого открытия для ряда областей инженерной практики и прежде всего для водного транспорта трудно переоценить. Дело в том, что гидрофобность способствует образованию в слое воды, ближайшем к поверхности движущегося тела, шарообразных структур из отдельных совокупностей молекул; поэтому гидрофобное тело при перемещении в воде как бы катится по шарикоподшипникам. А, как известно, трение качения значительно меньше трения скольжения.
Китообразные владеют еще одним чрезвычайно интересным способом уменьшения трения при своем движении. Речь идет о так называемом двигательном механизме кожи этих животных. Он вступает в действие тогда, когда дельфины достигают максимальной скорости и возникающие при этом вихревые потоки уже нельзя погасить ни антитурбулентными (демпферными), ни гидрофобными свойствами кожи. Именно в этот критический момент начинается волновое движение самого кожного покрова тела животного (рис. 12). Эти волнообразные складки кожи, пробегающие по туловищу дельфина (они были сфотографированы Ф. Эссапьяном во флоридском океанариуме), гасят вихри, возникающие при высоких скоростях, уменьшают силу трения в срединной и хвостовой частях тела животного и дают ему возможность легко мчаться даже в тесном стаде, в котором, казалось бы, вихревые потоки вокруг множества близко плывущих особей должны сделать невозможным стремительное передвижение всего стада.
Что же можно и что уже удалось позаимствовать инженерам из "конструкции" кожного покрова китообразных, чтобы достигнуть в судостроении "дельфиньего совершенства"?
В 1960 г. природный кожный покров дельфина послужил работающему в США немецкому инженеру М. Крамеру образцом для создания опытных демпфирующих покрытий твердых тел в целях снижения гидродинамического сопротивления трения. Первая мягкая оболочка - "дельфинья кожа", получившая название "ламинфло" (от слов "laminar flow" - ламинарное течение), была изготовлена сначала из двух, а затем из трех слоев резины общей толщиной 2,5 мм. Гладкий наружный слой (0,5 мм) имитировал эпидермис кожи дельфина; средний, эластичный, с гибкими стерженьками и демпфирующей жидкостью (1,5 мм) был аналогичен дерме с ее коллагеновой и жировой тканями, а нижний (0,5 мм) играл роль опорной пластины. Демпфирующая жидкость при давлении сверху могла перемещаться в пространствах между палочками-стерженьками: она играла роль демпфера - гасителя вихрей в пограничном слое воды, ближайшем к корпусу модели (рис. 13).
Уже первые опыты с торпедой и катером, обшитыми мягкой оболочкой "ламинфло", принесли весьма ощутимые результаты - вызываемое турбулентностью торможение снизилось почти наполовину, скорость увеличилась вдвое! Эксперименты, начатые Крамером, продолжили ученые разных стран. Изменялись соотношения элементов покрытия: толщина слоев, размеры и расположение сосочков - стерженьков, вязкость промежуточной жидкости и т. д.
Результаты многочисленных испытаний подтвердили возможность снизить сопротивление воды на 40 - 60%.
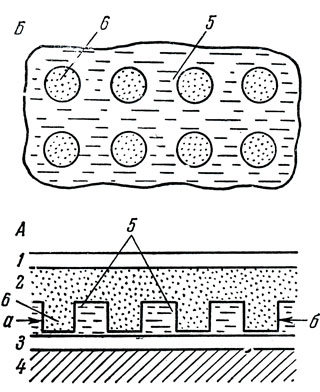
Рис. 13. Схема искусственной дельфиньей кожи - 'ламинфло'. А - боковой разрез, Б - разрез по линии аб. 1 - верхняя бесшовная оболочка; 2 - средний слой - эластичная диафрагма с гибкими стерженьками; 3 - нижняя бесшовная оболочка; 4 - корпус модели; 5 - пространство между стерженьками, заполненное демпфирующей жидкостью; 6 - гибкие стерженьки среднего слоя (по М. Крамеру)
Пока еще обшивка "ламинфло" очень далека от того совершенства, которое свойственно естественной коже дельфинов. В природных покровах быстро плавающих дельфинов демпфирование достигается тем, что мягкий жир под давлением эпидермиса и верхней части дермы перемещается в очень малых полостях между весьма упругими волокнами. Само демпфирование в покровах дельфинов осуществляется гораздо совершеннее, чем в искусственной коже "ламинфло", так как природный демпфирующий слой (дерма с сосочками и жировой пласт толщиной в несколько сантиметров) гораздо толще и состоит из более тонких капилляров. Однако продолжающееся изучение специфических особенностей кожи дельфина
и непрерывно расширяющийся арсенал средств и возможностей современной химии позволяют надеяться, что со временем удастся создать мягкие синтетические оболочки, по своей структуре и упругости весьма близкие к природному образцу. И тогда подводные лодки, катера, морские и океанские лайнеры, облицованные искусственной дельфиньей кожей, приобретут невиданную ранее быстроходность.
Можно также полагать, что подобные амортизирующие оболочки будут эффективны не только при движении твердых тел в жидкой или газообразной среде (подводные лодки, самолеты), но и при транспортировке жидких, газообразных и даже твердых тел по трубопроводам. Недавно сотрудник Питтсбургского университета (США) Р. Пелт выстлал внутреннюю поверхность трубы материалом, имитирующим дельфинью кожу (роль дельфиньей кожи исполняло покрытие из уретановой смолы на полиэфирной основе), и измерил, насколько снизились потери давления при перегонке жидкости по этой трубе. Оказалось, что они уменьшились на 35%.
Таким образом, нехитрую трубу (если сделать ее достаточно длинной) можно превратить в самый экономичный вид транспорта. Здесь поток грузов может двигаться непрерывно, днем и ночью, без простоев, перегрузок и перевалок, без потерь на "усушку-утруску-усыпку". По трубопроводам, выстланным "дельфиньей кожей", можно будет на сотни и тысячи километров перекачивать воду, горючие газы, спирт, патоку, жидкие удобрения, всевозможные гранулы, смешанные с водой в пропорции "один к одному", кормовую пасту для поросят и коров, помидоры, картофель, фрукты и даже... живую рыбу...
Но вернемся к кораблям голубых дорог и посмотрим, чем еще может помочь бионика в повышении их быстроходности. Ведь в наше время, время стремительного увеличения скоростей в авиации и невиданного ускорения всех наземных видов транспорта, морские и океанские суда, по сути, не затронуты этим всеобщим прогрессом скоростей, и нет сейчас более сложной и более жгучей проблемы на водных магистралях мира, чем повышение скорости пассажирских и грузовых кораблей. Это проблема проблем.
Бионические поиски показывают, что, помимо обшивки судов искусственной дельфиньей кожей, у природы можно позаимствовать еще один весьма эффективный способ повышения быстроходности судов.
А нельзя ли избавиться от волнового сопротивления? Можно, только для этого нужно уйти под воду. "Теоретические расчеты и опыты на моделях показали, - пишет контр-адмирал А. Родионов, - что подводный транспорт имеет ряд преимуществ перед надводным. Так, для подводного транспорта сопротивление воды меньше, чем для надводного. (На глубине около 100 м волн, а значит, и волнового сопротивления уже нет.) Это означает, что мощность энергетической установки на подводном транспорте при прочих равных условиях должна быть меньше, чем у надводного. Подводный транспорт не подвержен влиянию ветра, волн, оледенения. Ему не нужно снижать скорость и отстаиваться в укрытых местах при штормах и ураганах. Продолжительность навигации в замерзающих районах для надводных судов (даже с ледоколами) ограничена. В районах с разреженным льдом они плавают, хотя и самостоятельно, но с малой скоростью. Подводные же корабли очень удобны для плавания в северных морях, так как они легко двигаются подо льдами; холода и туманы, любая непогода им не помеха".
Все эти обстоятельства заставили кораблестроителей и экономистов более глубоко, нежели это делалось раньше, заняться изучением целесообразности строительства грузовых и пассажирских подводных судов, которые во многом обещают быть лучше надводных.
Морской флот ныне является самой мощной в мире транспортной системой, от работы которой зависит благосостояние крупнейших стран и развитие мировых экономических связей. В 1966 г. в одном лишь Атлантическом океане ежедневно в плавании находилось около 4 тысяч судов с грузами. Объем морских перевозок растет из года в год. Вместе с интенсивным ростом грузооборота идет фантастическое увеличение размеров и тоннажа строящихся судов. Еще недавно самым большим судном в мире считался японский танкер "Токио Мару" дедвейтом (общей величиной всех грузов) около 150 000 т. Но он недолго удерживал лидерство среди плавающих в настоящее время кораблей грузового флота. В 1967 г. вступил в строй танкер дедвейтом 205 000 т. Длина нового судна составляет 342 м, ширина 50 м, высота борта 23 м и осадка 17,33 м. Танкер предназначен для перевозки нефти из портов Персидского залива в порты Японии. Но и этот танкер недолго будет крупнейшим судном мира. Четыре японские судостроительные фирмы получили заказ на постройку танкеров дедвейтом от 150 000 до 280 000 т. Ведутся переговоры о строительстве танкера-гиганта дедвейтом 500 000 т.
Несколько иначе обстоит дело с грузоподъемностью подводных судов. Хотя теоретические расчеты и показали, что из всех возможных типов подводных судов наиболее экономичны крупные подводные супертанкеры дедвейтом свыше 100 000 т, однако постройка таких судов пока технически трудно осуществима; поэтому большинство ведущихся ныне проектных разработок производится применительно к танкерам дедвейтом не более 50 000 т.
В настоящее время по заданию правительственных органов, а также частных судовладельческих и судостроительных компаний США, Англии и Японии и некоторых других стран ряд специально созданных проектно-исследовательских организаций выполнил более 50 разработок подводных судов различных типов. В Англии, например, проявляют интерес не только к подводным танкерам, но и к подводным рудовозам, пригодным для круглогодовых рейсов в замерзающие порты Канады. Уже спроектирован атомный подводный рудовоз "Моби Дик" дедвейтом 28 000 т. Его максимальная расчетная скорость хода - около 50 км/час. Корпус рудовоза похож по своей форме на кита. Все грузовые помещения находятся внутри прочного корпуса, в средней части корабля.
А какие движители и двигатели следует ставить на подводные суда?
Некоторые кораблестроители считают, что для скорости ниже 100 узлов еще длительное время пальму первенства будут удерживать суда с винтовыми движителями. Однако здесь имеется одно "но" - заклинивание винта на больших глубинах. Это обстоятельство заставляет ученых вновь заняться попытками использования принципа волнообразного движения рыб при конструировании судов для подводного плавания. Ряд проведенных экспериментов показал, что к. п. д. нового устройства доходит пока что лишь до 16%. Вместе с тем некоторые соображения позволяют надеяться, что при удачной конструкции к. п. д. можно будет значительно увеличить. Результаты исследований, - пишет журнал "Мэшин Дезайн", - пока что скромны. Но перед нами всего лишь первые, нетвердые шаги младенца, который будет расти, мужать и развиваться...
Что касается двигателей, то для подводного транспорта дизели и электромоторы, питающиеся от аккумуляторов, разумеется, не годятся. Их мощности не позволяют строить большие, высокоскоростные суда. Для скорости порядка 100 и более узлов подводные суда, по мнению специалистов, придется снабжать двигателями типа ракетных, прямоточных, с воздушнореактивными моторами или турбореактивными установками. С этим бионики согласны, однако они считают, что создателям будущих подводных судов все же следует заглянуть в "конструкторское бюро" природы, пойти на выучку к некоторым обитателям царства Нептуна. Ведь природа из поколения в поколение совершенствовала "конструкцию" рыб, все лучше приспосабливала их организмы к жизни и передвижению в воде. Человек же относительно недавно научился строить корабли, а тем более подводные суда. И, конечно же, кораблестроителям есть чему поучиться у древнего и мудрого мастера - природы в создании высокосовершенных двигателей и движителей. Достаточно сказать, что, в отличие от существующих технических средств подводного транспорта, у всех подводных обитателей функции двигателя и движителя совмещены в одном мышечном механизме, без промежуточных звеньев, а это, как известно, способствует эффективной отдаче энергии, повышению коэффициента полезного действия, обеспечивает надежность работы системы.
Вот пример. В зоологическом саду во Франкфурте-на-Майне можно увидеть рыбок с необычным строением тела: грудные и брюшные плавники у них деформированы и напоминают согнутые руки, оканчивающиеся длинными пальцами. На "локтях" находятся отверстия, приспособленные для "реактивного" движения. Заглатывая широко раскрытым ртом воду, рыбки под большим давлением выталкивают ее через эти отверстия.
В результате реактивной силы отдачи тело рыбок движется с большой скоростью.
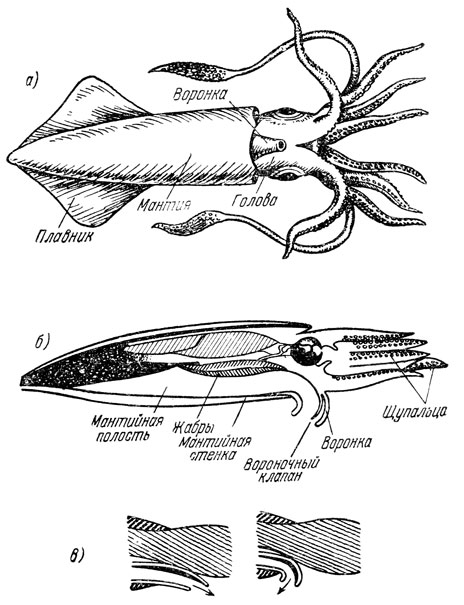
Рис. 14. Кальмар и его реактивный движитель, а) Кальмар - живая ракета; б) пульсирующий реактивный движитель кальмара; в) положение сопла и его клапана при движении кальмара назад (слева) и вперед (справа)
Реактивное движение, используемое ныне в самолетах, ракетах и космических снарядах, свойственно также головоногим моллюскам - осьминогам, кальмарам, каракатицам. Наибольший интерес для техников представляет реактивный движитель кальмаров. В сущности, кальмар располагает двумя принципиально различными движителями (рис. 14, а). При медленном перемещении он пользуется большим ромбовидным плавником, периодически изгибающимся в виде бегущей волны вдоль корпуса тела. Для быстрого броска животное использует реактивный движитель. Основой его является мантия - мышечная ткань. Она окружает тело моллюска со всех сторон, образуя своеобразный резервуар (мантийную полость), в который периодически засасывается вода. В мантийной полости находятся жабры и внутренние органы кальмара (рис. 14, б). Объем мантийной полости составляет почти половину объема тела моллюска. При реактивном способе плавания животное производит засасывание воды через широко открытую мантийную щель внутрь мантийной полости из пограничного слоя. Мантийная щель (она плотно "застегивается" на специальные "запонки" после забора воды) расположена вблизи середины тела кальмара, где оно имеет наибольшую толщину. Сила, вызывающая движение животного, создается за счет выбрасывания струи воды через узкое сопло (воронку), которое расположено на брюшной поверхности кальмара. Это сопло снабжено специальным клапаном, и мышцы могут его поворачивать. Изменяя угол установки воронки (рис. 14, в), кальмар плывет одинаково хорошо как вперед, так и назад (если он плывет назад, - воронка вытягивается вдоль тела, а клапан прижат к ее стенке и не мешает вытекающей из мантийной полости водяной струе; когда кальмару нужно двигаться вперед, свободный конец воронки несколько удлиняется и изгибается в вертикальной плоскости, ее выходное отверстие разворачивается на 180° и клапан занимает изогнутое положение). На забор воды и ее выталкивание животное затрачивает доли секунды. Засасывая воду в мантийную полость в кормовой части тела в периоды замедленных движений по инерции, кальмар тем самым осуществляет отсос пограничного слоя, предотвращая таким образом срыв потока при нестационарном режиме обтекания. Увеличивая порции выбрасываемой воды и учащая сокращения мантии, кальмар легко увеличивает скорость движения.
Инженеры уже создали движитель, подобный движителю кальмара. Его называют водометом. В нем вода засасывается в камеру, а затем выбрасывается из нее через сопло; судно движется в сторону, противоположную направлению выброса струи. Вода засасывается и выталкивается при помощи обычного бензинового или дизельного двигателя. Почему же движитель кальмара по-прежнему привлекает внимание инженеров, является объектом тщательных исследований биоников? Дело в том, что для передвижения под водой удобно иметь устройство, работающее без доступа атмосферного воздуха. Поэтому поисковые работы инженеров направлены на создание конструкции гидрореактивного двигателя, подобного воздушнореактивному, т. е. такого, где двигатель и движитель составляют одно целое.
Весомый вклад в решение этой проблемы обещают внести химики. Они ведут работу над синтезом особых веществ, способных гореть в воде, как бензин или керосин в воздухе. Располагая необходимым горючим, творцы нового "подводного" мотора при разработке его конструкции, несомненно, учтут опыт строителей авиационных реактивных двигателей и обязательно воспользуются подсказкой природы, создавшей "живую ракету" - кальмара.
Гидрореактивный движитель кальмара очень экономичен в работе. Отработанный природой на протяжении многих миллионов лет и доведенный ею до высокой степени совершенства, он позволяет кальмару в погоне за косяками рыб, служащих для него основной пищей, легко совершать в океане тысячемильные переходы. Кальмары могут развивать скорость до 70 км/час, причем это, вероятно, не предел. Хотя прямых измерений, насколько нам известно, никто не производил, некоторые исследователи, занимающиеся изучением головоногих моллюсков, считают, что возможная максимальная скорость передвижения кальмаров в воде может достигать 150 км/час.
Кальмаров поистине можно назвать "спринтерами моря". Они способны стартовать из морских глубин в воздух с такой скоростью, что нередко пролетают над волнами более 50 м. Высота полета такой живой ракеты над водой, по свидетельству бывалых моряков, иногда достигает 7 - 10 м. В отличие от подавляющего большинства быстроходных рыб, обладающих малой маневренностью на большой скорости, кальмарам присуща поразительная маневренность в воде, они производят чрезвычайно стремительные повороты не только в горизонтальной, но и в вертикальной плоскости,
Изумительной быстроходности и маневренности кальмаров в большой степени способствуют чудесные гидродинамические формы тела животного. Тело у кальмаров мягкое, но упругое, и оно способно существенно деформироваться. Набирая скорость, кальмар вытягивается и сбоку очень похож на профиль самолетного крыла. Его спина становится более выпуклой, чем брюхо. Продольная ось тела при этом совпадает с направлением поступательного движения. Иначе говоря, тело - "крыло" - все время сохраняет нулевой угол атаки. Неодинаковые скорости потоков над и под крылом создают подъемную силу. Перемещаются кальмары, как и другие головоногие моллюски, хвостом вперед, а голова и десять ног-щупалец с присосками служат как бы кормой. При движении щупальца плотно складываются вместе, и вода их хорошо обтекает. Они снабжены продольными килями, которые образуют кормовое оперение корпуса кальмара. Эти необычайно длинные (по сравнению с размерами тела моллюска) кили надежно стабилизируют направление движения кальмара; при их помощи он легко сохраняет и меняет курс.
Таким образом, изучение локомоторного аппарата кальмаров, гидродинамических показателей формы их тела может дать инженерам-кораблестроителям богатый материал для создания высокоманевренной морской ракеты, способной развивать под водой огромную скорость.
Разумеется, моряку и даже специалисту-судостроителю 60-х годов нашего столетия трудно представить себе во всех деталях, какими будут корабли, скажем, через 50 лет.
И все же, читатель, давайте мысленно совершим экскурсию в морской порт 2018 года... У причалов стоят корабли, по форме очень похожие на китов, дельфинов, акул, тунцов и кальмаров. Один из них закончил погрузку, отходит от пирса и направляется в открытое море. Несколько минут, величаво покачиваясь на волнах, плывет, купаясь в лучах заходящего солнца "белый кит" и... исчезает под водой. Пройдет немного времени, и столь же неожиданно он выплывает из глубин океана в другом полушарии...
Теперь посмотрим, что могут позаимствовать инженеры из "патентов" природы для развития современного воздушного транспорта.
Вероятно, раньше всех на Земле начали летать представители растительного царства. Ведь своеобразные "крылья" имеют многие семена деревьев и растений. Так, у семян клена сравнительно большая аэродинамическая поверхность, имеющая вид двух симметрично расположенных лопастей, которые, высыхая, несколько закручиваются. Падая на землю, семена быстро вращаются, аэродинамические силы задерживают падение семени, благодаря чему ветер может отнести его на значительное расстояние. Легкие семена тополя окружены пухом, что дает им возможность в теплые сухие дни подниматься высоко над землей под действием воздушных потоков и долго парить, далеко улетая от родного "дома". У ели и сосны семя снабжено одним прозрачным крылышком-парусом. В зимнее время ветры заставляют семя "под парусом" скользить по насту, словно буер по льду, и оно перемещается на десятки километров от материнского дерева.
В начале нашего века ученые заинтересовались летными свойствами крупного семени одного из тропических растений - цанонии из семейства тыквенных. Семена цанонии подолгу парят в воздухе, поднимаясь и опускаясь в его потоках. По их образцу и были созданы первые планеры и самолеты "летающее крыло". Одно время эти модели были очень популярны, но потом о них почему-то забыли...
Природа создала очень много оригинальных летающих "конструкций". Достаточно сказать, что значительная часть всех известных в настоящее время видов живых существ способна летать. Не говоря уже о птицах и насекомых, природа сделала крылатыми даже многих рыб.
Тот, кому хоть раз довелось видеть полет летучих рыб, вероятно, никогда не забудет это любопытное зрелище. У этих летунов длинные грудные и хвостовые плавники, напоминающие удлиненные крылья. Сильным движением хвоста летучая рыба отталкивается от воды и совершает пологий планирующий полет со скоростью около 30 км/час, поднимаясь на высоту до 3 м. Дальность его около 100 - 150 м, длительность - 10 - 18 сек.
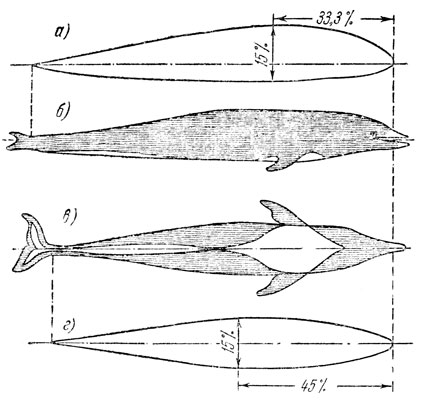
Рис. 15. Быстроходный дельфин хорошо обтекаемой формы и близкие по контурам аэродинамические профили (по С. В. Першину). а) Несимметричный 15%-ный профиль ЦАГИ серии В; 6) и в) вид дельфина сбоку и снизу (экземпляр длиной 2,08 м, весом 56 кг); г) симметричный 15%-ный ламинаризованный профиль НАКА
Законы гидродинамики и аэродинамики имеют много общего, и поэтому изучение строения рыб и способов их передвижения представляет большой интерес не только для конструкторов различных подводных кораблей, но и для авиастроителей. Проведенные в последнее время исследования показывают, что некоторые конструкции и устройства, используемые в современном самолетостроении, можно было бы с успехом позаимствовать у рыб. За примерами далеко ходить не надо. Посмотрев на рис. 15, мы увидим, что контуры тела быстроходного дельфина в вертикальной и горизонтальной проекциях очень сходны с контурами известных аэродинамических профилей, обладающих наибольшей подъемной силой. Оказывается, что и тело акулы обладает такой же (если не большей!) подъемной силой, как и крыло самолета. Вот вам и плавающие рыбы!
Но если говорить об истории полетов человека, то она началась не с копирования летающих "конструкций" растений и рыб, а с изучения полета птиц и насекомых. В дошедших до нас трудах Леонардо да Винчи, Джоана Домиана (около 1500 г.), алхимика Иакова IV Шотландского и других мыслителей прошлого можно найти множество схем, набросков и рисунков летательных аппаратов с машущими крыльями. В них постоянно повторяются крылья различных птиц, насекомых и летучих мышей. По утверждению русских летописцев XVI века, "смерд Никитка, боярского сына Лупатовых холоп", летал с помощью крыльев. В 1699 г. на голубиных крыльях "...поднялся аршинов на 7... и упал на спину, но небольно..." стрелец рязанский Серов. Легенды XVIII века повествуют о крылатых снарядах приказчика Островкова и кузнеца Черная Гроза. Первый сделал крылья на бычьих пузырях, второй придумал крылья из проволоки и перьев и прицепил к ногам хвост. Хранящиеся в филиале Государственного архива Тюменской области документы рассказывают о том, что бежавший из митрополичьего дома бывший иеромонах Федор Мелес, украинец, в 1762 г. построил крылья для полета и "...практикой показал, как может человек совершенно подобию птице по воздуху, куда хочет, летать... и означенный же к летанию способ зделав, он намерен был отсель из Тобольска через те улететь прямо в Малороссию... мог бы скоро перелететь из Тобольска до Малороссии, еже бы способный ветер последовал, всемирно через один день, а не более". Век спустя идея постройки "воздухоплавательного аппарата" возникла у русского моряка, капитана первого ранга А. Ф. Можайского. Проведенное им длительное и тщательное изучение строения крыльев птиц, механики птичьего полета, как известно, завершилось постройкой первого самолета с неподвижно раскрытыми крыльями.
Научившись летать, человек превзошел птицу по скорости полета в 1912 г., по высоте полета - в 1916 г. и по дальности полета - в 1924 г. А вот по экономичности полета даже самые лучшие в мире воздушные лайнеры, переносящие за несколько часов сотни пассажиров через моря и океаны, все еще отстают от птиц. Да еще как отстают!
Возьмем к примеру наши стремительные "ИЛ-18" и "ТУ-114" и прикинем, какой вес этих воздушных гигантов приходится, скажем, на одну лошадиную силу их двигателей. Получается, что у самолетов это соотношение составляет 14 кг, у орла в пересчете на мощность его живого "двигателя" оно равно 70 кг, у обыкновенного аиста - даже 135 кг. Вот и выходит, что летательный механизм аиста почти в 10 раз экономичнее, чем у самых совершенных самолетов.
Экономичность полета пернатых проявляется особенно наглядно во время их длительных миграций. Чибисы, например, перелетают из Англии в Ньюфаундленд через Атлантический океан, покрывая расстояние в 3500 км без остановки. Почти фантастическим кажется перелет кроншнепов, гнездящихся на Аляске и зимующих на островах Таити, на Гавайских островах и т. п. Весь путь протяженностью в 9500 км (более 3000 км над морем), они, видимо, проделывают без отдыха. Некоторые буревестники гнездятся на островах Тристак-да-Кунья, отстоящих от ближайшей суши на 2400 км, и при этом проделывают путь в одну сторону более 10 000 км. Птицы летят без отдыха как над водными пространствами, так и над пустынями. За время своего "беспосадочного" перелета они проделывают огромную мышечную работу. Так, например, перелет мелких певчих птиц через Сахару длится 30-40 час. За это время каждая пернатая путешественница при 4 - 5 взмахах крыльев в секунду поднимает и опускает их около 500 тысяч раз!
Пройдя строжайший естественный отбор и вместе с тем совершенствуясь в полете на протяжении многих миллионов лет, птицы превзошли созданные людьми первоклассные летательные аппараты и в маневренности. Этому прежде всего способствуют прекрасные аэродинамические формы птиц. Клюв, голова, шея плавно выгнуты в полете, ноги поджаты и почти не выступают из корпуса, напоминая убранное шасси самолета. Известна, например, порода голубей, которые во время полета неоднократно перекувыркиваются, или авторотируют, не теряя при этом равновесия. Виртуозно летает альбатрос. Он может летать несколькими способами: махая крыльями, паря в восходящем потоке воздуха и подпрыгивая на встречных "волнах" (двигаясь с порывами ветра). И все это благодаря совершенной аэродинамической форме крыльев. Сокол сапсан в горизонтальном полете развивает скорость около 90 км/час, но, увидев жертву, он немедленно бросается на нее с высоты и, пикируя, достигает скорости 360 км/час. Промахнувшись, он короткой дугой, без взмаха крыльями снова поднимается в небо. Попутно небезынтересно отметить, что пикирование сапсана долго не давало покоя всем ученым, пытавшимся разрешить проблемы бомбометания с пикирования. Некоторые фигуры высшего пилотажа выполняют и ласточки, полет которых отличается значительной быстротой (до 120 км/час!) и маневренностью. Хорошо летают летучие мыши. В полете они мастерски маневрируют, а некоторые из них даже могут "висеть" в воздухе на одном месте. Такими же способностями обладают жаворонок, зимородок и пустельга. Но, пожалуй, пальму первенства в маневренности следует отдать самым маленьким представителям пернатого мира - колибри. Эти птички-невелички (весом от 2 до 6 2 при длине туловища 15 - 20 мм) с оперением, которое можно сравнить с блеском драгоценных камней, носят романтичные, красивые названия, вроде "ТО-пазовый колибри", "эльф украшенный", "орлиный клюв", "синяя борода"; в погоне за насекомыми они развивают на спринтерских дистанциях скорость до 100 км/час. Некоторые виды колибри поднимаются в горы до высоты 4000 м и выше, где из позвоночных животных встречаются лишь одни могучие кондоры. Стремительная в полете птичка-невеличка может останавливаться в воздухе и, не переставая работать крыльями, подолгу "висеть" неподвижно в одной точке, словно крохотный вертолет. Она может даже летать "боком" и "задним ходом". Такая высокая маневренность полета достигается большой частотой взмахов крыльев (более 50 взмахов в секунду) и тем, что колибри машут крыльями не вертикально, как все птицы, а горизонтально (это позволяет им, в частности, летать хвостиком вперед!).
Разве не заманчиво творцам современных воздушных лайнеров, располагая столь блестящими примерами природы, довести экономичность и маневренность своих кораблей до уровня, достигнутого птицами? На сей счет, нам думается, двух мнений быть не может.
Но прежде чем изложить, как этого можно достичь, необходимо, хотя бы кратко, рассмотреть механическую схему полета птиц.
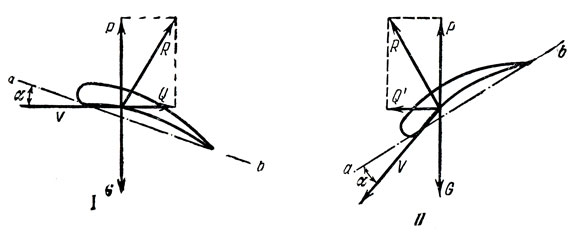
Рис. 16. Разложение сил, действующих на крыло птицы во время полета. R - сила полного сопротивления воздуха; Р - подъемная сила; Q - сила лобового сопротивления; Q' - сила тяги; G - вес птицы; ab - хорда крыла; а - угол атаки. I - птица летит на неподвижно распростертых крыльях, используя приобретенную ранее скорость; V - направление полета птицы. II - птица летит с помощью взмахов крыльями; направление взмахов вертикально и совпадает с силой тяжести (или имеет строго противоположное направление); V - истинное направление движения крыла, определяемое в результате вертикального движения крыла относительно туловища и горизонтального движения вместе с туловищем
Для простоты представим себе сначала, что птица, работая крыльями, приобрела уже известную скорость и теперь использует ее, продолжая полет на неподвижно распростертых крыльях. При этом птица испытывает сопротивление движению со стороны воздуха, которое мы изобразим в виде силы R, называемой силой полного сопротивления воздуха. Ее можно разложить по известному правилу параллелограмма на две составляющие: силу Р, направленную по вертикали, и перпендикулярную ей силу Q (рис. 16, I). Первая сила Р направлена вверх и стремится поднять крыло, поэтому ее называют подъемной силой. Если подъемная сила равна весу птицы, то высота полета не изменяется, птица летит горизонтально. Если же сила Р больше веса птицы, последняя поднимается вверх; если она меньше веса, то происходит потеря высоты, птица снижается. Сила Q тормозит поступательное движение и называется силой лобового сопротивления.
Если сила лобового сопротивления больше силы тяги, то движение замедляется, в противном случае движение ускоряется, и, наконец, в случае равенства сил тяги и лобового сопротивления скорость движения остается постоянной.
Откуда же возникает сила тяги? При взмахе крыла вниз составляющие силы распределяются несколько по-иному, чем в только что разобранном случае. Сила Р по-прежнему направлена вверх и уравновешивает силу тяжести, а перпендикулярная ей сила Q' направлена вперед и создает тягу. Разложение сил при всевозможных положениях крыла показывает, что сила тяги может возникать и при поднимании крыла (рис. 16, II). Определяющим моментом в этом случае служит знак так называемого угла атаки, т. е. угла между хордой крыла и направлением набегающего на него воздушного потока.
Итак, чем больше подъемная сила по сравнению с лобовым сопротивлением, тем эффективнее полет, тем выше так называемое качество летательного аппарата. В свете сказанного всю историю авиации, в сущности, можно свести к решению следующей важнейшей задачи: увеличить подъемную силу и уменьшить вредное лобовое сопротивление. Главными способами борьбы с лобовым сопротивлением до последнего времени были "зализывание" форм самолета и уменьшение угла атаки.
Но можно ли уменьшать угол атаки до бесконечности? Нет! Существует определенный предел, ниже которого полет самолета становится невозможным. Но это в том случае, когда крыло неподвижно. А если заставить его двигаться подобно птичьему? Оказывается, что тогда можно достичь максимума подъемной силы и свести к минимуму лобовое сопротивление!
Таким образом, для резкого повышения экономичности полета современных самолетов нужно прежде всего перейти к машущему полету. Но осуществить его, а главное - достичь желаемого эффекта - задача далеко не простая даже в наш XX век, век, казалось бы, безграничных возможностей науки и техники.
Лет двадцать пять тому назад много говорили и писали в Германии о некоем Эрихе фон Хольсте, который изготовил несколько механических птичек. Они были маленькие, совсем как настоящие, и, представьте себе, летали! Окрыленный успехом, Эрих фон Хольст задался целью построить орнитоптер - летательный аппарат с машущими крыльями. За Хольстом последовали многие изобретатели различных стран. Строили махолеты, или, как их еще называют, птицелеты, самых различных конструкций. Один из таких махолетов весил больше полутонны, площадь его крыльев достигала 30 м2, они делали от 25 до 90 взмахов в минуту. По расчетам, такой орнитоптер способен был поднять не одного, а даже нескольких пассажиров. Однако взлететь ему так и не удалось: не хватило подъемной силы. Другие махолеты, едва оторвавшись от земли, неизменно тотчас же падали...
Почему же зарубежные изобретатели потерпели в своих первых попытках создания махолета неудачу? Все дело в том, что Хольст и его последователи пытались слепо копировать природу, забывая, а быть может, попросту не зная того, что законы, характерные для полета птиц, не подходят для больших летательных аппаратов с машущими крыльями. Одно дело - аэродинамика обычного самолета с неподвижным крылом, другое дело - аэродинамика машущего крыла. Несмотря на то, что человечество начало изучать полет птиц со времен Леонардо да Винчи, до сих пор тайна этого феномена еще полностью не разгадана.
Раскрыть секреты феноменальной подъемной силы птичьего крыла, постигнуть закономерности полета пернатых, переложить их на инженерный язык, взять у летающих "конструкций" живой природы все самое выгодное, найти новые законы для постройки махолетов - этим сейчас увлечены бионики многих стран. Правда, далеко не все инженеры-авиастроители разделяют идею перспективности машущего полета, однако число приверженцев махолетов с каждым годом непрерывно растет. Только в одной Москве их около тысячи.
Вот уже более 15 лет в столице нашей родины работает Комитет машущего полета Федерации авиационного спорта СССР. Инженеры и рабочие, летчики и биологи, кинематографисты и орнитологи, математики и скульпторы в тесном содружестве с учеными Института морфологии животных им. А. Н. Северцева АН СССР - доктором наук Г. С. Шестаковой и кандидатами наук Т. Л. Бородулиной, В. Э. Якоби, И. В. Кокшайским исследуют механику и аэродинамику полета птиц, строят модели орнитоптеров, сооружают различные испытательные стенды для изучения механизма действия крыльев и т. п. И если бы вам, читатель, довелось солнечным октябрьским утром 1962 г. побывать на одном из подмосковных аэродромов, то вы бы увидели первые результаты упорного и кропотливого труда этого большого коллектива энтузиастов машущего полета...
По бетонной дорожке, плавно взмахивая гибкими крыльями девятиметрового размаха, мчался необычный летательный аппарат. Сильная струя воздуха, отбрасываемая машущими крыльями, заставляла никнуть траву по краям дорожки. Набрав скорость 25 - 30 км/час, аппарат начал подпрыгивать. А еще через несколько секунд его колеса повисли в воздухе. Аппарат летал над аэродромом недолго, так как программа испытаний была рассчитана только лишь на проверку тяги и подъемной силы. Однако первый же экспериментальный полет показал, что даже при очень небольшой скорости - вдвое меньшей, чем требуется самолету, - махолет с маломощным моторчиком в 18 л.с. легко отрывается от земли.
Спустя полтора года, точнее, 19 апреля 1964 г., на стадионе "Динамо" в Москве были проведены соревнования нескольких моделей аппаратов с машущими крыльями. Присутствующие на соревнованиях воочию убедились, что полет на таких аппаратах абсолютно безопасен, так как махолет может садиться при нулевой поступательной скорости. А если вдруг в воздухе откажет двигатель? Это не страшно: махолет плавно спланирует на распластанных крыльях.
Итак, за последние годы в нашей стране несомненно достигнуты определенные успехи в моделировании полета птиц. Но это отнюдь не значит, что проблема машущего полета уже решена и мы можем завтра приступить к созданию орнитоптеров, которые будут более экономичными и маневренными, чем самые лучшие современные самолеты. Для эффективного моделирования полета птиц необходимо не только убедиться в том, что наша модель обладает теми или иными свойствами или особенностями, но и разработать методы расчета заранее заданных технических характеристик устройства, а также методы их синтеза, обеспечивающие достижение требуемых в поставленной задаче показателей. Иными словами, чтобы успешно моделировать полет птиц, необходимо располагать теорией их полета. А такой теории, к сожалению, пока нет.
Разработка теории машущего полета - задача чрезвычайно трудная. Не говоря уже об очень большой сложности физической схемы исследуемого процесса, здесь, в отличие от аэродинамики обычного самолета с неподвижными крыльями, приходится сталкиваться с массой новых величин и функциональных зависимостей, которые следует соответствующим образом учитывать. Например, рассматривая машущее крыло, мы встречаемся с такими новыми по сравнению со случаем неподвижного крыла показателями, как угловая скорость, число взмахов, амплитуда взмаха, ускорение в разных фазах взмаха; переменными становятся такие бывшие константами в случае неподвижного крыла величины, как установочный угол, угол атаки, сами аэродинамические силы в разных фазах взмаха и т. д. Отсюда неизбежно вытекают сложность в осуществлении экспериментальных исследований и затруднения в теоретическом обобщении их результатов.
Однако в наше время имеется немало совершенных технических средств и методов, позволяющих в значительной степени облегчить или даже обойти ряд трудностей, встречающихся при исследовании различных летных показателей птиц. Достаточно упомянуть, например, радары, используемые для определения высоты полета птиц, скоростные кинокамеры, применяемые для определения частот, амплитуд и скоростей взмахов крыльев, телеметрическую аппаратуру, используемую для измерения физиологических показателей летящей птицы, и др. Благодаря этой технике надежность и точность экспериментальных исследований в последнее время значительно повысились. Очень многое дает при изучении закономерностей полета птиц применение методов сравнительных исследований (разумеется, в том случае, когда внимание в равной степени обращено на морфологию, физиологию и экологию сравниваемых биологических объектов). В природе существует огромное многообразие типов полета птиц. Это многообразие определяется не только количеством видов птиц, но и тем, что каждый вид может использовать несколько типов полета. При сопоставлении птиц разных видов, различающихся теми или иными особенностями полета, выявляется взаимосвязь между изменением искомых параметров или конструктивных особенностей летательного аппарата. Конкретными примерами успешного применения упомянутого подхода могут служить выяснение значения аллометрии крыльев птиц и расшифровка механизма бессрывного обтекания, связанного с управлением пограничным слоем.
До реактивной авиации мы практически не управляли пограничным слоем воздуха, обтекавшим крылья. Ставили, правда, закрылки на аэродинамические гребни, чтобы воздушные потоки не перетекали по крылу. Но ведь у птиц нет никаких "аэродинамических гребней". Как они управляются без этих приспособлений? Ведь пограничный слой возникает и у птичьих крыльев.
Для объяснения этого появилась очень смелая и, можно даже сказать, дерзкая гипотеза: птицы обладают "чувством потока", активно управляют пограничным слоем. Они умеют направлять поток в любую нужную им сторону. Однако для того, чтобы гипотеза стала достоверной научной истиной, нужны веские, убедительные доказательства. Их поисками занялась Т. Л. Бородулина. Она обследовала и сравнила строение крыльев многих хороших и плохих летунов и установила следующее:
"Плавность обтекания птицы потоком воздуха при полете в большой степени зависит от микроструктуры перьев. У быстро и много летающих птиц лучи второго порядка (или бородочки) имеют широкую основную часть в виде тонкой пластинки, переходящую в длинную тонкую нить (пенулу). В месте перехода обычно бывает несколько шипообразных зубцов. Благодаря такому строению перьев происходит дробление воздушного потока по телу птицы на многочисленные мельчайшие потоки и бессрывное и плавное их стекание, что имеет существенное значение для уменьшения лобового сопротивления. Кроме того, пластинки основной части луча второго порядка расположены под положительным углом атаки к направлению полета и можно предположить, что это обеспечивает отсос части воздуха, препятствует отрыву ламинарного слоя и образованию турбулентных потоков.
Рельеф поверхности крыла - бороздчатый, что обеспечивает требуемое направление потоков воздуха, обтекающих крыло. На верхней стороне крыла у всех птиц бородки расположены более или менее веерообразно: они расходятся к заднему краю крыла, что увеличивает скорость прохождения потоков воздуха по крылу. На нижней же стороне бородки направлены иначе. У птиц с быстрым полетом (например, у уток) линии рельефа на нижней стороне крыла S-образно изогнуты и сходятся к основанию крыла. Это вызывает торможение потоков воздуха или их завихрение на нижней поверхности крыла. Вследствие различия скоростей прохождения воздушных потоков сверху и снизу крыла увеличивается подъемная сила последнего.
Предварительное продувание крыла с наклеенными шелковинками убедило нас в том, что на нижней поверхности крыла воздушные потоки отклоняются соответственно направлению бородок".
В настоящее время учеными изучено 14 различных характеристик живого крыла (влияние структуры перьев, уравновешивание крыла в движущемся потоке и др.). Дальнейший успех в разрешении множества вопросов, связанных с практическим осуществлением машущего полета, сейчас, очевидно, в значительной мере будет зависеть от того, насколько биологам, аэродинамикам, математикам, физикам и механикам удастся совместить результаты, добываемые при морфо-экологическом исследовании птиц, с современными теоретическими представлениями аэродинамики.
Однако уже сегодня ясно, что формула крыла орнитоптера не будет похожей на формулу крыла птицы. Иначе крыло махолета должно было бы иметь бороздки. По-видимому, кое-какие особенности будут отличать и другие элементы крыла. Некоторые ученые утверждают, что будущий птицелет "...будет тем полнее отвечать требованиям человеческой практики, чем меньше он будет представлять собою точную копию птицы...". Но не будем забегать слишком далеко вперед, строить прогнозы о том, что будет и чего не будет в махолете от летательного аппарата птицы. Сегодня, нам думается, важно другое: наметился путь, идя по которому ученые, несомненно, разгадают тайну полета птиц. И когда будет создана стройная физическая теория машущего полета, адекватная высокой сложности явления, инженеры, безусловно, построят махолеты - неприхотливые, экономичные, маневренные машины. Человек будет летать, как голубь или альбатрос, а может быть, и лучше.
Помимо изучения полета птиц у человека имеется еще один путь решения проблемы машущего полета.
Старинная восточная легенда рассказывает о мудреце, который сделал летательную машину с машущими крыльями, похожую на огромное насекомое. Когда мудрец узнал, что враги хотят похитить машину, он сжег ее. Так навеки была потеряна тайна конструкции механической стрекозы. Эта и многие другие легенды повествуют о том, что еще в далекой древности зародилась идея постройки летательного аппарата по принципу насекомого - энтомоптера*. Однако до последнего времени интересные особенности полета насекомых сравнительно мало привлекали внимание инженеров - конструкторов летательных аппаратов. Объяснить это можно лишь одним: полет насекомых - очень сложный процесс. Он таит в себе сотни загадок, ответ на которые еще не найден. Так, например, согласно чаконам современной аэродинамик майский жук летать не должен. Однако, ниспровергая всю нынешнюю теорию полета и сбивая с толку специалистов по аэродинамике, это насекомое все же летает. Для того чтобы летать, майский жук при среднем весе 0,9 г должен иметь коэффициент подъемной силы (относительная величина, пропорциональная подъемной силе) от 2 до 3, фактически же у этого насекомого коэффициент подъемной силы меньше 1!
* (Энтомоптер - от греческих слов "энтомон" (насекомое) и "птерон" (крыло). )
Известно, что коэффициент подъемной силы наиболее совершенных крыльев, созданных самолетостроителями, колеблется от 1 до 1,5. Следовательно, крыло жука, хотя и кажется несовершенным, обеспечивает сравнительно большую подъемную силу. Этим обстоятельством заинтересовались ученые Нью-Йоркского университета. Для изучения полета майского жука они сконструировали в натуральную величину искусственное крыло (чтобы точно воспроизвести работу крыла, исследователи долго и внимательно анализировали кинопленку, на которой методом скоростной съемки был заснят полет жука). Экспериментальная установка позволяла измерять смещение крыла величиной 0,000025 см. Недавно руководитель проводимых исследований Леон Беннет заявил: "Если мы сумеем определить аэродинамику полета майского жука, мы или обнаружим какое-то несовершенство в современной теории полета насекомого, или откроем, что майский жук обладает каким-то неизвестным нам способом создания высокой подъемной силы".
Однако оставим в покое майского жука и обратимся к другим летающим насекомым, которых в природе насчитывается более 350 000 видов.
По-видимому, среди животных насекомые стали летать первыми. Во всяком случае, достоверно известно, что летающие насекомые появились на Земле более 300 миллионов лет назад. Далеко не все насекомые хорошо летают. Едва ли не большинство составляют посредственно и плохо летающие виды. Но есть множество форм, которые летают превосходно. Полет насекомых в основном определяется двумя факторами: характером мышц крыла и строением самого крыла. Так, у златоглазки - одного из немногих доживших до нашего времени представителей когда-то процветавшей группы сетчатокрылых - мускулатура передних и задних крыльев одинакова по мощности. Обе пары крыльев похожи по форме и величине. Летные возможности златоглазки практически ничтожны: судорожные взмахи крыльев позволяют ей достичь в лучшем случае скорости 60 см/сек. Такие же плохие летуны скорпионовы мухи и некоторые дневные бабочки, у которых передняя и задняя пары крыльев почти одинаковы или, во всяком случае, работают одинаково, да еще не синхронно, а "вразнобой". Исключение составляют лишь стрекозы; сохранив одинаково развитые пары крыльев, они тем не менее обладают превосходными летными качествами. Но у стрекоз совсем особое устройство крыловой мускулатуры - их "крыловый мотор" (крыловая скелетно-мышечная система) высоко специализирован. Главную роль в полете стрекоз играют мышцы прямого действия.
Кроме того, переднее крыло стрекозы далеко отодвинуто от заднего и они не соприкасаются друг с другом. У всех остальных современных видов насекомых в процессе эволюции одна пара крыльев усилилась за счет другой.
Здесь невольно сама собой напрашивается аналогия: подобно тому как творцы самолетов заменили старые, тихоходные "этажерки" - бипланы и трипланы - монопланами, природа помогла многим четырехкрылым насекомым усовершенствовать свой летательный аппарат, избавив или почти избавив его от лишней пары крыльев. У двукрылых - мух, слепней, комаров - задние крылья исчезли не бесследно, а превратились в жужжальца. Каждое жужжальце состоит из вздутого основания, тонкой ножки и вздутой головки и имеет вид булавы. Эти жалкие остатки задних крыльев не играют активной роли в полете, а лишь косвенно связаны с ним: они, говоря инженерным языком, выполняют функции стартера. Так как многие двукрылые взлетают на высоком ритме ударов крыльев, жужжальца способствуют "разгону" крыловых мышц. Постепенно ускоряя ритм своих движений, жужжальца вызывают соответствующие ритмические события в тех частях нервной системы насекомого, которые управляют крыловой мускулатурой. Когда достигается нужный ритм, включается собственно двигательный аппарат - "мотор крыла" сразу начинает работать полным ходом, что и требуется для взлета. У перепончатокрылых же переднее и заднее крылья сцеплены друг с другом, образуя механическое целое без всяких, однако, сращений. Переднее крыло пчелы, например, имеет на заднем краю складку - "карман". В него входят загнутые крючки переднего края заднего крыла, и последнее оказывается как бы на буксире у переднего и работает в унисон с ним (рис. 17, а). Почти так же устроен сцепочный механизм у тлей (рис. 17, 6, в, г), с той лишь разницей, что крючков здесь немного и они тесно сближены. Бабочки имеют иные сцепочные механизмы - толстые щетинки на нижней стороне заднего крыла входят в складку на переднем крыле. У многих высших форм этих приспособлений нет и крылья связываются посредством широкого наложения переднего на заднее. Но важен не способ соединения, а результат: у всех перепончатокрылых переднее и заднее крылья каждой стороны крепко скреплены и работают как одно целое. Таким образом, выражение "четырехкрылые" не следует понимать буквально. Морфологически четырехкрылое построение является функционально двукрылым.
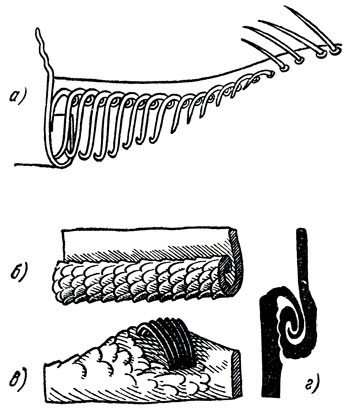
Рис. 17. Механизмы сцепления крыльев у пчел (а) и у тлей (6, в, г)
Рассмотрим теперь устройство крыла насекомого. На первый взгляд твердое, сухое крыло мухи или бабочки кажется безжизненным образованием. Но в действительности это далеко не так. В него входят нервы, внутри крыла имеется даже (правда, не у всех насекомых) кровообращение. Крыло насекомого - это изумительное "инженерное" творение природы, достойное восхищения техников. Оно разделяется на две механически различные компоненты: жилки и мембрану. Жилки, будучи построены по типу полых трубок, представляют собой чрезвычайно прочные образования. Но площадь, занимаемая ими в крыле, весьма незначительна, так как они очень тонки. Промежутки между жилками, ячейки, затянуты тонкой прозрачной мембраной. Последняя занимает большую часть площади крыла и очень гибка. Однако, будучи разделена на ячейки, натянутые на прочный каркас жилок, она приобретает значительную прочность. В общем, совокупность жилок и мембраны напоминает распущенный зонт с материей, натянутой на стальные прутья. Такое строение обеспечивает обширную гребную поверхность крыла при минимальной затрате материала и минимальном весе. Работа крыла характеризуется частотой взмахов. У насекомых же частота ритмических ударов крыльями очень велика. Ночные бабочки делают от 35 до 45 взмахов в секунду, стрекоза коромысло - от 80 до 100, оса - ПО, шмель - от 180 до 240, комнатная муха - 330, медоносные пчелы-от 180 до 340, комары - около 600 взмахов в секунду. Комары толкунчики, рои которых часто вьются столбом, предвещая хорошую погоду, делают 800 взмахов в секунду, а комары дергуны и комары мокрецы - даже до 1000 взмахов в секунду! Такой высокий ритм работы крыльев (а он присущ большинству хорошо летающих форм) убедительно говорит о колоссальной прочности крыльев. Крыло насекомого "оснащено" большим количеством разнообразнейших микроскопических органов чувств. Крохотные колбочки, щетинки, волоски, различаемые лишь при многократном увеличении под микроскопом, сложные устройства, называемые хордотональными сенсиллами, - вся эта удивительная аппаратура помогает насекомому отлично ориентироваться в пространстве. Одни органы регистрируют скорость встречного потока воздуха, другие выполняют осязательную функцию, третьи регистрируют крутящие моменты в разных направлениях. Остается только пожелать, чтобы самолеты будущего располагали комплексом столь точных, малогабаритных и высоконадежных в работе приборов!
Характер полета насекомых чрезвычайно разнообразен. Некоторые виды могут парашютировать. Такой полет наблюдается при роении поденок; при этом насекомое, взлетев вертикально на 1 - 2 м вверх и остановив крылья в несколько приподнятом положении, медленно падает вниз. В замедлении спуска, кроме крыльев, большую роль играют длинные хвостовые нити. Вследствие сопротивления воздуха они раздвигаются, загибаются концами вверх и тянут за собой и конец брюшка. Когда насекомое снова начинает работать крыльями, набирая высоту, хвостовые нити сближаются, их концы загибаются вниз и брюшко опускается. Таким образом, это настоящий парашютный спуск, но здесь парашютируют не только плоскости крыльев, но и хвостовые нити. Крупным формам свойствен планирующий полет: насекомое "выключает мотор" и в течение некоторого времени движется вперед - планирует. Например, крупная бабочка перламутреница планирует в течение 20 сек со скоростью 1 - 3 м/сек, а крупная стрекоза, используя на высоте 3 - 4 м токи воздуха, восходящие от нагретой почвы и растительности, может планировать до 4 - 5 мин. Но поскольку планирующий полет требует большой абсолютной величины крыла, он не получил большого развития у насекомых.
Основной формой полета насекомых является гребной полет, т. е. полет в результате непрерывных ритмических взмахов крыльями. Познакомимся теперь с механизмом гребного полета, с аэродинамическим эффектом движения крыла на двух схемах Маньяна (рис. 18). На первой схеме (А) показана стадия опускания крыла, на второй (Б) - стадия его подъема.
В полете крыло насекомого работает то верхней, то нижней поверхностью, поворачиваясь вокруг продольной оси насекомого. Когда крыло переходит из положения I в положение IV, оно бьет сверху вниз своей нижней поверхностью (положения II и III показывают это особенно ясно). Возникает подъемный эффект, в результате которого тело насекомого поднимается вверх. При переходе из положения IV в V крыло поворачивается вокруг продольной оси и, пройдя через вертикальное положение, переходит в наклонное - нижним краем вперед. После этого начинается обратное движение крыла, т. е. его подъем вверх, изображенный на схеме (Б). Нетрудно увидеть, что, переходя из положения VI в VII и VIII, крыло, словно весло, ударяет спереди назад. Вследствие этого тело насекомого получает толчок вперед. Дойдя до крайней верхней и задней точки, крыло снова поворачивается около своей продольной оси, затем принимает горизонтальное положение, и цикл повторяется вновь. Первую часть траектории крыла называют подъемной, или элеваторной, вторую - пропеллирующёй. За полный цикл вершина крыла описывает по отношению к телу насекомого восьмеркообразную кривую, наклоненную верхним концом назад, или лемнискату, которая при движении растягивается в кривую, напоминающую синусоиду (рис. 19). Благодаря большой частоте взмахов элеваторный эффект аэродинамически сливается с пропеллирующим, и насекомое движется вверх и вперед. Таким образом, согласно теории Марея - Бюлля - Маньяна, принцип работы крыла насекомого столь же прост, сколь и совершенен.
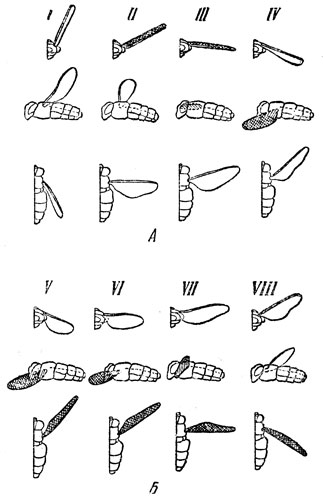
Рис. 18. Правое крыло летящего насекомого в основных положениях I - VIII. Вид сзади (вверху), сбоку (в середине) и сверху (внизу). Обращенная к зрителю вентральная поверхность заштрихована накрест, когда она видна, и косо, когда она заслонена туловищем (по Маньяну)
Итак, крыло насекомого в полете все время меняет свое положение относительно тела и воздуха, постоянно меняет угол атаки и скорость. Это открывает огромные возможности для активного воздействия на угол атаки, потому что всегда можно подобрать такие режимы взмаха, чтобы свести лобовое сопротивление к минимуму.
Вот наглядное тому подтверждение. Недавно советские инженеры Н. В. Погоржельский, И. Н. Виноградов и Г. А. Гладких спроектировали по принципу работы крыла насекомого ветряк.
Использование в его конструкции восьмеркообразного взмаха (особыми добавочными и подвижными лопастями) принесло ощутимый эффект по сравнению с работой обычных ветряков. Такой ветряк может работать при очень малых скоростях ветра и практически бездействует только при полном штиле.
Рис. 19. Траектория, описываемая концом крыла насекомого. Вверху - относительно его тела, внизу - относительно неподвижного наблюдателя (по В. Ковалеву и С. Ошанину)
Гребной полет имеет у насекомых различные формы. Он является предпосылкой для планирования и парашютирования, а главное - позволяет достигать больших скоростей. В 1937 г. в одном из солидных американских журналов появилось сообщение о том, что определенный вид мух способен летать со скоростью до 1554 км/час. Публикация была воспринята по-разному: одна часть читателей была ошеломлена сообщением, другая - приняла сенсацию восторженно. Но все это длилось недолго - возмущенные физики заявили, что в рамках элементарных законов природы полет мухи со сверхзвуковой скоростью невозможен. Однако скорости перемещения насекомых достаточно велики. Тот, кому приходилось гоняться за бабочками, знает, что и капустница, и белянка, и бабочка адмирал, если они вздумали лететь на дальнее расстояние, мгновенно превращаются из еле-еле порхающих созданий в скоростные махолеты, способные развивать скорость до 40 км/час. Во всяком случае, угнаться за ними - дело совершенно безнадежное. Известен случай, когда бабочка данаида, выпущенная в Бристоле, пролетела за 5 час около 130 км.
Точно определить абсолютные скорости полета насекомых в естественных условиях очень трудно. Карл фон Фриш, например, выпускал занумерованных пчел на большом расстоянии от улья, куда они немедленно возвращались. Моменты выпуска и возвращения в улей точно регистрировались. В этих опытах скорость полета равнялась 23,5 км/час. Другие исследователи установили, что медоносная пчела может летать со скоростью до 50 км/час. Французский ученый А. Маньян (1934 г.) прикреплял к телу насекомого тонкую нить, которая сматывалась с легко вертящегося барабана, и таким образом определял скорость полета насекомых 30 видов. Однако этот метод далеко не безупречен, поскольку вес нити и трение оси барабана, несомненно, уменьшали скорость полета насекомых. Ныне, используя комплекс новейших методов и средств исследования, ученым все же удалось получить достаточно достоверные данные о скорости полета ряда насекомых. Так, майские жуки пролетают в секунду до 3 м, шмель - до 5 м, жуки-навозники - до 7 м, стрекозы - до 10 м. Бабочка олеандровый бражник - жительница средиземноморских тропиков - по неизвестным причинам нередко прилетает к берегам Балтийского моря. Расстояние в 1200 км она покрывает менее чем за сутки, т. е. летит со средней скоростью 15 м/сек, или 54 км/час. Из известных нам насекомых наибольшей скоростью горизонтального полета, по-видимому, обладает крупная стрекоза дозорщик. Не раз наблюдалось, что она подолгу сопровождала в полете учебный самолет, летевший со скоростью 144 км/час и более, и временами даже обгоняла его!
Абсолютные скорости полета насекомых зависят от длительности полета, температуры воздуха, скорости и направления ветра и ряда других параметров. Но при всех благоприятных условиях абсолютная скорость насекомых, за исключением таких, как бабочки бражники, стрекоза дозорщик, все же очень мала, в десятки раз меньше, чем у современных самолетов. Сравним скорости самолета со скоростями птиц и насекомых. Если скорость самолета равна 900 км/час, то для стрижа она равна 100, для скворца 70, для вороны 50 и для шмеля 18 км/час. Зато не может не вызвать самого большого восхищения относительная скорость полета насекомых. Если сравнить относительные скорости для тех же примеров, т. е. подсчитать, сколько раз за единицу времени данный летун успеет отложить длину своего тела в полете, то оказывается, что относительная скорость больше всего у насекомого и меньше всего у самолета!
Большинство насекомых (даже хорошо летающих), видимо, ограничивается небольшими перелетами. Так, медоносная пчела летает за нектаром на расстояние (в среднем) 1,5 - 2,25 км. Но для того, чтобы собрать 400 г меда, она должна, по расчетам пчеловодов, совершить от 40 до 80 тысяч полетов, т. е. в общей сложности должна пролететь расстояние, равное двум окружностям Земли! Известно немало случаев "беспосадочного перелета" насекомых из одной местности в другую, находящуюся на большом расстоянии от первой. В Японии, например, часто наблюдается перелет стрекоз между островами, удаленными друг от друга на 50 - 60 км. Известны перелеты лугового мотылька из Кокчетава в Актюбинск и другие пункты на расстояния 400 - 450 км. Зарегистрированы случаи перелетов роев саранчи через Красное море, где промежуточные посадки исключены. В научной литературе имеются указания на то, что австралийских стрекоз ловили в открыто океане на расстоянии 1540 км от их родного материка. Многие бабочки (среди них наши адмиралы) проделывают путь в Африку, а следующее поколение возвращается обратно в Европу. Одной из рекордсменок по дальности полетов является американская крупная бабочка данаис - она перелетает из Мексики в Канаду и Аляску, покрывая, таким образом, расстояние до 4000 км.
Разумеется, при таких перелетах нельзя не учитывать воздушных течений. Но как бы то ни было, собранные учеными данные убедительно говорят о том, что маленькие, нежные на вид существа - насекомые (речь идет о насекомых отдельных видов) способны находиться в воздухе в течение многих часов и' преодолевать гигантские расстояния. Этим они, безусловно, обязаны совершенству своего летательного аппарата и главным образом высокой экономичности работы своего "мотора". По экономичности полета многие насекомые превзошли даже птиц. Так, саранча в полете теряет примерно 0,8% своего веса за час полета. "Горючим" для ее мышечного двигателя служат жировые запасы. У тех насекомых, которые расходуют в полете углеводы, потери веса больше: например, плодовая мушка дрозофила теряет за час полета 7 - 10% своего веса. Интересный расчет экономичности полета пчелы произвел кандидат биологических наук Ю. М. Залесский. Вес пчелы с грузом нектара и пыльцы равен примерно 0,2 г, вес мышц, приводящих в движение крылья, составляет меньше 15 % веса насекомого. Если пчела пролетает от места сбора нектара и пыльцы до улья 3 км, то совершенная ею работа исчисляется в 0,6 кгм. Известно, что 1 кгм работы соответствует 0,0024 ккал. Следовательно, произведенная пчелой работа (0,6 кгм) эквивалентна 0,00144 кал. Сгорая в организме при совершении работы, 1 г сахара дает 4,1 кал. Поэтому пчела, пролетая расстояние в 3 км, расходует только 0,00035 г сахара. В зобе пчелы помещается 0,02 г нектара с концентрацией в нем сахара, равной 20%; иными словами, в зобе находится 0,004 г чистого сахара. Следовательно, даже при расстоянии 3 км полет пчелы вполне рентабелен, так как расход "горючего" - сахара - не превосходит 9 % полезного груза!
Теперь сопоставим приведенные данные с соответствующими данными для летательных аппаратов, созданных человеком. Вертолет расходует за час полета 4 - 5% веса (разумеется, речь идет о топливе), а реактивный самолет - 12%. Как видно, инженерам стоит поучиться искусству экономии горючего в полете у саранчи, да и у пчелы тоже.
Высокая экономичность полета насекомых в значительной степени обусловлена режимом работы их крыльев. Так, скорость взмаха, т. е. скорость, с которой движется конец крыла по отношению к телу насекомого, довольно велика. По Маньяну, у стрекозы она равна (для заднего крыла) 2,75, у пчелы - 5,5 и у каллифоры - 8,4 м/сек. Теперь остановимся на ритме ударов крыла. Полет начинается с редких взмахов, свободно улавливаемых глазом, затем взмахи крыльев становятся значительно чаще и полет сопровождается гудением и жужжанием. Несомненно, что частота последовательных сокращений мышц крыла у насекомых значительно больше, чем у позвоночных. Для сравнения укажем, что черный гриф, у которого размах крыльев превышает длину тела почти в 3 раза, делает в течение секунды всего один взмах; фазаны, куропатки, перепела, рябчики, стремительно перелетающие по прямой, в основном на короткие расстояния, делают в секунду до 5 взмахов крыльями. В отличие от птиц, у хорошо летающих видов насекомых с небольшими крыльями частота взмахов очень высока. Оказывается, что сила, необходимая для удержания в воздухе разных насекомых одинакового веса при помощи взмахов крыльями, обратно пропорциональна частоте взмахов. Насекомое, делающее 55 взмахов в секунду, расходует вдвое больше мощности, чем насекомое того же веса, но делающее ПО взмахов в секунду. Исследования показали также, что при одинаковых условиях вес поднимаемого груза зависит от частоты взмахов крыльями. В этом отношении весьма показателен полет медоносной пчелы. Установлено, что рабочая пчела, вылетающая из улья за взятком, делает в среднем 180 взмахов крыльями в секунду. Когда же она возвращается с грузом, число взмахов возрастает до 280 - 330. Очевидно, наделяя медоносную пчелу способностью делать очень частые взмахи крыльями, природа имела в виду дать ей возможность нести, помимо веса своего тела, добавочный груз - взяток (нектар, пыльца). Расчеты показывают, что если бы пчела делала не 280 - 330 взмахов в секунду, а 560 - 660, т. е. вдвое больше, то она могла бы переносить по воздуху груз весом в 16 таких же пчел, как и она сама!
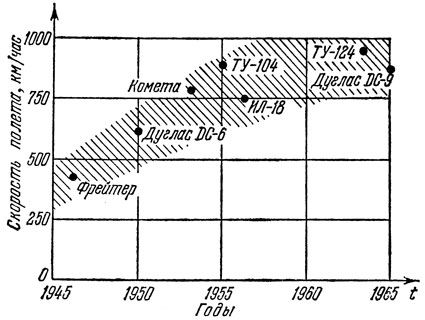
Рис. 20. График роста скоростей пассажирских и транспортных самолетов за последние 20 лет (по В. Мясищеву)
Весьма поучительно проведенное учеными сравнение летных характеристик насекомых и летательных аппаратов, построенных человеком. Оказывается, природа испокон веков великолепно "знала" формулу, которую не так давно вывели математики. Эта формула - очень простое соотношение, которое называют числом Рейнольдса*. В числителе - произведение размаха крыльев тела на скорость его Движения, в знаменателе - кинематический коэффициент вязкости воздуха v. Так вот, это самое число Рейнольдса - одна из самых важных летных характеристик. Чем больше число Рейнольдса, тем интенсивнее бесчисленные воздушные водовороты, завихрения около крыла самолета, и он тормозится. У современных пассажирских лайнеров число Рейинольдса громадно - порядка миллионов, тогда как для саранчи оно примерно равно 2000!
* (Число Реинольдса Re равно lV/v, где l - размах крыльев, V - скорость полета, a v - кинематический коэффициент вязкости среды (если скорость при обтекании тела в воздухе значительно меньше скорости звука, то сжимаемостью воздуха можно пренебречь и, следовательно, допустимо рассматривать его как жидкость). Число Рейнольдса - безразмерная величина. При числах Рейнольдса, меньших 2200, в цилиндрической трубе обычно имеет место ламинарное течение, при больших его значениях наступает турбулентное течение. )
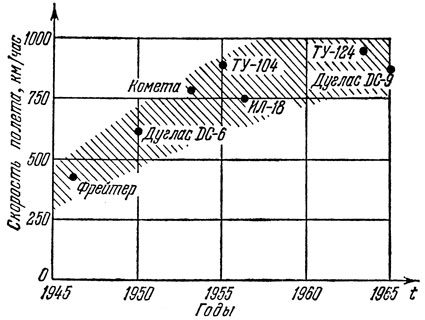
Рис. 21. График роста длины взлетно-посадочных полос за 20 лет (по В. Мясищеву)
Не менее остро, чем проблема повышения экономичности полета самолетов, ныне стоит вопрос о создании летательных аппаратов, не требующих длинных взлетно-посадочных полос и способных садиться и взлетать почти вертикально. Можно назвать несколько причин, выдвинувших эту задачу в число самых актуальных проблем современности. По утверждению известного советского авиаконструктора В. Мясищева, основная причина - стремительный рост скорости полета самолетов. С 1945 по 1965 г. только у пассажирских и транспортных самолетов скорость выросла в среднем в 2 раза (с 350 - 450 до 700 - 1000 км/час) и практически приблизилась к околозвуковым скоростям (рис. 20). Чем выше скорость самолета, тем больше, как правило, и его пробег при посадке. Головокружительная скорость при посадке, достигающая 250 - 300 км/час, требует огромных посадочных полос. За последние 25 лет их длина увеличилась более чем в 3 раза - с 700 - 800 м до 2,5 - 3 км (рис. 21). Столь большие размеры взлетно-посадочных полос и чрезмерно высокий уровень шума, создаваемого мощными двигательными установками, заставляют располагать аэродромы далеко за пределами городов. В результате мы оказались свидетелями своеобразного парадокса: увеличение скорости полета на маршрутах средней протяженности весьма мало сказывается на сокращении общей продолжительности путешествия. Например, на маршруте Москва - Ленинград чистое время полета равно 50 мип и составляет примерно 1/3 от общего времени, затрачиваемого пассажиром. А остальные 2/3 - больше 1,5 час - приходятся на поездки из города в аэропорт отправления и из аэропорта назначения в город. Вторая причина актуальности проблемы вертикального взлета и посадки связана с появлением тяжелых транспортных летательных аппаратов. Практика показала, что эти аппараты могут успешно решать такие важные народнохозяйственные задачи, как доставка грузов, машин и оборудования в труднодоступные, удаленные от основных дорог районы новостроек. Получаемый при этом эффект значительно возрос бы, если бы транспортные самолеты обладали способностью совершать взлет и посадку на небольшие, специально не подготавливаемые площадки. Необходимость в подобных машинах испытывает и военно-транспортная авиация. Наконец, третья причина носит сугубо военный характер. Так, например, самолеты-перехватчики не имеют времени разгоняться по бетонированным дорожкам аэродромов. Они должны свечой взмывать вверх на перехват противника. Упомянем еще одно обстоятельство. Боевые сверхзвуковые самолеты базируются сегодня на аэродромах с бетонированными взлетно-посадочными полосами длиною до 3,5 км. Не говоря уже о том, что строительство подобных сооружений связано с большими затратами, эти аэродромы легко обнаружить и разрушить. Больше того, но мере развития боевых действий такие стационарные аэродромы могут оказаться на большом удалении от района применения самолетов, эффективность использования которых при этом существенно снизится. Решение этого вопроса связывают также с созданием не зависящих от аэродромов боевых машин с вертикальным взлетом и посадкой.
За последнее время предложено немало способов уменьшения длины разбега самолетов. Здесь и применение ракет, и форсирование двигателей, и т. п. Для сокращения пробега самолетов применяют тормоза, реверсивные винты, тормозные щитки на крыльях и фюзеляже, парашюты и тормозные приспособления, устанавливаемые на посадочных полосах. Все это несколько задержало увеличение размеров аэродромов, но, несмотря ни на что, аэродромы для современных самолетов имеют огромную протяженность. Чтобы избавиться от бетонированных дорожек, иногда применяют взлет со специальной тележки, оставляемой на земле, посадку на лыжи и др.
Рис. 22. Американский экспериментальный вертикально взлетающий аппарат с гибридным несущим трехлопастным ротором
Но все это полумеры. Для истребителя-перехватчика, например, они не подходят. Он должен взлетать и садиться без разбега, с очень небольшой площадки. Не подходят они и для пассажирских и транспортных аппаратов, обладающих высокой скоростью полета и большой грузоподъемностью. И вот десятки и сотни инженеров разных стран продолжают ломать голову над тем, как же решить эту задачу, которая сегодня кажется неразрешимой. Изобретательная человеческая мысль не желает мириться с пессимистическими прогнозами. Стремление решить проблему вертикального взлета и посадки наиболее эффективным образом привело к появлению самых неожиданных проектов летательных аппаратов. Так, конструкторы одной американской фирмы наделили свою новую вертикально взлетающую машину (рис. 22) легким алюминиевым ротором треугольной формы с тремя лопастями по углам. После осуществления взлета ротор выключается, одна из его лопастей "выстраивается" вдоль фюзеляжа, а поднимающиеся из него специальные створки закрывают зазор "лопасть - фюзеляж". Остальные две лопасти при этом превращаются в придатки треугольного крыла и участвуют в создании подъемной силы, удерживающей машину в воздухе. Новый вид вертолета-самолета развивает скорость в горизонтальном полете до 700 км/час. При приземлении аппарата ротор вновь приводится в движение, и машина спускается по вертикали на землю, не требуя аэродрома. Ротор аппарата вращается газовой турбиной. Движение по горизонтали осуществляется на реактивных двигателях, находящихся в конце фюзеляжа. Идею вращающегося треугольного крыла использовали и конструкторы другой американской фирмы. Больше того, они развили ее дальше. В предложенном ими проекте самолета "Гелиплейн" машина снабжена двумя вращающимися треугольными крыльями, но уже без концевых лопастей. Роль последних в создании необходимой вертикальной тяги, по замыслу конструкторов, должны выполнять отклоняющиеся концевые части крыльев. Предполагается, что подобные машины, обладая способностью вертикального взлета и посадки, смогут развивать скорость до 950 км/час. Еще более оригинальный проект вертикально взлетающего пассажирского аппарата предложил немецкий изобретатель Рейнхольд Каллетш. Во время стоянки на земле эта машина должна напоминать самолет без крыльев, опирающийся на телескопические стойки шасси длиной 5 м. Особенностью этого аппарата является подъемное устройство, представляющее собой три вращающиеся в перпендикулярной к фюзеляжу плоскости штанги-спицы, на концах которых шарнирно укреплены эллипсообразные пластины-крылья. На взлете и при посадке для вращения такого составленного из крыльев "винта" должны применяться укрепленные на штангах реактивные сопла, к которым подаются газы от турбореактивных двигателей самого аппарата. Аналогичное устройство, но уже меньших размеров предусмотрено и на хвосте фюзеляжа. Во время вращения "винтов" специальное приспособление будет управлять положением пластин-крыльев с таким расчетом, чтобы они все время находились под некоторым углом атаки к набегающему потоку и, следовательно, создавали необходимую подъемную силу. После осуществления вертикального старта "винты" будут останавливаться, и их пластины-крылья станут выполнять свои традиционные функции.
Можно было бы рассказать по меньшей мере еще о двух десятках "летающих неожиданностей", существующих либо еще только на листах ватмана, либо в виде экспериментальных машин. Однако ни один из предложенных проектов не дает авиаконструкторам права утверждать, что проблема вертикального взлета и посадки решена. Не говоря уже о многочисленных технических трудностях, препятствующих созданию высокосовершенных вертикально взлетающих самолетов, здесь еще приходится считаться с экономической стороной проблемы. Проведенные одной американской фирмой исследования показывают, что стоимость аппаратов вертикального взлета и посадки будет почти вдвое, а эксплуатационные расходы - примерно на 75% больше, чем у современных самолетов. Нет нужды доказывать, что решать проблему вертикального взлета и посадки такой дорогой ценой нельзя.
Где же выход? Да опять-таки в применении "изобретенного" природой механизма машущего полета и прежде всего в моделировании довольно широко распространенного среди насекомых "стоячего" полета. Стоячий полет, т. е. полет, при котором организм при помощи крыльев может держаться в воздухе совершенно неподвижно, является разновидностью гребного полета. Все, вероятно, видели летом небольших мух, "висящих" в воздухе как бы в одной точке (при этом тело насекомого большей частью занимает горизонтальное положение). Время от времени они внезапно передвигаются на несколько десятков сантиметров и вновь неподвижно "застывают" в воздухе. Передвижение происходит настолько быстро, что уловить его нельзя, можно лишь убедиться, что муха исчезла с прежнего места и появилась в другом. Это мухи семейства сирфид (журчалки). Их стоячий полет может длиться часами и, по-видимому, не утомляет насекомое. Сирфиды могут "выключать" пропеллирующую часть своего полета, оставляя только подъемную (элеваторную), поэтому они не подвигаются вперед и "зависают" неподвижно в любой точке пространства. Траектория перемещения крыла у них изменена следующим образом. Крыло опускается, не заносясь вперед. Оно ударяет, таким образом, вниз всей своей поверхностью и дает элеваторный эффект. Дойдя до предела опускания, крыло поворачивается на 90° вокруг своей продольной оси передним краем вверх, так что плоскость крыла становится вертикально. В таком положении оно возвращается по прямой вверх, прорезая воздух передним краем, как ножом. При таких условиях поднятие крыла не дает пропеллирующего эффекта и вся работа крыла ограничена элеваторными ударами. Достигнув верхнего положения, крыло поворачивается и снова принимает горизонтальное положение. В эту долю секунды муха успевает "начать падение", завершающееся мягкой вертикальной посадкой, т. е. делает то, на что способен не каждый вертолет. Приведем еще один пример. Пчела, садясь на цветок, на момент неподвижно повисает в воздухе, затем вытягивает вперед все шесть лапок и плавно опускается всей тяжестью своего тела на избранную "посадочную площадку", удерживаясь на ней лапками с цепкими коготками. Полная безопасность посадки! И еще одна деталь. В отличие от вертолета, нуждающегося для посадки в довольно ровной, горизонтальной площадке, пчела и другие насекомые садятся на неровный и часто совсем не горизонтально расположенный предмет, в приведенном примере на цветок. Даже в этой небольшой детали посадки есть чему поучиться у насекомых.
Большой интерес для техники представляет высокая маневренность полета насекомых, умение виртуозно управлять им. Так, бражники развертывают на лету свой длинный хоботок и вводят его в цветок, не присаживаясь. Например, бабочка языкан питается на льянке, у которой вход в венчик закрыт двумя губами. Ориентация хоботка должна быть здесь очень точной, и насекомому в этом помогает работа крыльев. Бражник при этом покачивается в воздухе около цветка вправо и влево. Одними из самых поворотливых в воздухе насекомых являются многие мухи. Так, даже на комнатной мухе, которая не принадлежит к особенно хорошо летающим формам, можно наблюдать, как одна особь гоняется за другой. Муха очень быстро бросается в воздухе из стороны в сторону, а другая муха следует за первой на коротком расстоянии, в точности повторяя траекторию ее полета. Относительно стрекоз, перепончатокрылых и бражников известно, что они могут передвигаться в воздухе не только вперед, но и назад. Немало насекомых способно выполнять в воздухе невероятные "эволюции", вплоть до самых головокружительных фигур "высшего пилотажа". В частности, равно или разнокрылые стрекозы могут вертикально подниматься и опускаться, а затем посредством быстрой авторотации переходить в обычный полет. Одна из сирфид легко делает "бочку" и "мертвую петлю" Нестерова. Более того, она может даже повисать в воздухе в полной неподвижности спинкой вниз! Делается это так: сначала муха занимает нормальное положение, спиной вверх, затем она поворачивается на 90° вокруг продольной оси крыльев головой вверх, затем поворачивается в том же направлении еще на 90° и принимает положение спиной вниз. Весь этот каскад фигур насекомому удается выполнить благодаря очень большой быстроте работы рецепторного и летательного аппаратов и их точной координации. Достаточно сказать, что муха хризотоксум кувыркается в воздухе с такой скоростью, что каждый ее поворот в вертикальной плоскости занимает всего лишь 0,001 сек!
Рассмотренные выше многообразные преимущества летных характеристик насекомых побудили отдельных ученых, инженеров, изобретателей различных стран заняться разработкой энтомоптеров - аппаратов, летающих по тому же принципу, что и насекомые. За последнее время у нас в СССР и за рубежом было создано несколько моделей энтомоптеров. Некоторые из них даже поднимались в воздух. Однако соперниками самолетов и вертолетов эти экспериментальные аппараты, как известно, пока еще не стали по той простой причине, что все конструкции энтомоптеров были созданы без учета необычайно сложной кинематики и аэродинамики крыла насекомого, которое хранит еще десятки нераскрытых секретов.
Но создание энтомоптера уже не фантастика. Это вполне осуществимая машина. Следует лишь иметь в виду, что небольшие размеры насекомых, их малый вес обусловливают совсем другую аэродинамику полета, чем та, которая возможна для больших конструкций. Здесь нельзя основываться только на законах подобия, так как с увеличением размеров энтомоптера до размеров самолета значительно меняются все соотношения между прочностью и гибкостью крыла, частотой взмахов и другими показателями. Вероятно, первые "настоящие" энтомоптеры, созданные с учетом подробных знаний о физическом механизме полета насекомых, будут летательными аппаратами так называемой "малой авиации". Управляемые по радио, они будут служить надежным средством связи, для переброски небольших грузов, для аэрофотосъемки, для подъема аэрологических приборов на высоту и других целей. Далее, энтомоптеры, по-видимому, станут удобным транспортным средством для широких масс населения. Такой махолет по своим размерам, как нам мыслится, не будет больше современного легкового автомобиля, он будет гораздо проще по конструкции, легче в управлении и научиться летать на нем можно будет за несколько дней. Для полета из Москвы в Ленинград потребуется израсходовать не более... десятка литров бензина!
Есть еще один вид махолетов, попытки создания которых почти всегда оканчивались неудачами или едва уловимыми успехами; над ними работали многие поколения изобретателей, а некоторые упорно продолжают трудиться и сейчас. Это - мускульный махолет, или попросту мускулолет. Аппараты с машущими крыльями, напоминающими птичьи, строят из самых легких материалов. Сами изобретатели и их немногочисленные приверженцы и помощники впрягаются в изготовленные ими механизмы и с яростью раскачивают рычаги до полной потери сил в надежде преодолеть земное притяжение. Мускулолеты подбрасывают, разгоняют на велосипедных колесах по наклонной плоскости, дают первый сильный толчок длинными резиновыми шнурами. Однако ничего обнадеживающего из проводившихся до последнего времени экспериментов извлечь не удалось, и многие изобретатели в конце концов пришли к выводу, что "человек не может летать, пользуясь только силой своих мышц". В ряде статей попытки создания мускулолетов были даже отнесены к категории бредовых идей. Но вот, сравнительно недавно, группа советских спортсменов из бухты Провидения доказала, что такой полет совершенно реален. Они сконструировали своеобразный летающий велосипед, приводимый в движение, как и обычный наземный, усилием мышц ног. На нем северянам удалось пролететь 200 - 300 и. Конструкторы одной английской фирмы и студенты Саутгемптонского университета несколько усовершенствовали этот "летающий велосипед", и в настоящее время они уже пытаются ставить на таких мускулолетах "рекорды" дальности и маневренности.
Сегодня мускулолет еще очень несовершенен. И, вероятно, он никогда не станет транспортным средством. Но после того, как биологи и инженеры досконально изучат законы работы крыла птиц и насекомых, а энтузиасты машущего полета получат в свое распоряжение новейшие конструкционные материалы, можно надеяться, что мускулолет приобретет широкое применение в спорте. Это будет интереснейший и очень полезный спортивный аппарат, с помощью которого можно будет выполнять большие прыжки в длину и высоту, совершать довольно длительные полеты на "бреющей" траектории. Под словом "будет" мы имеем в виду оставшуюся треть XX столетия. Мы глубоко верим, что именно в наш ракетный век миф об Икаре станет былью (рис. 23). Стремление человека подняться в воздух, парить в нем, опираясь на силу собственных мышц, неукротимо!
Рис. 23. Крылья Икара в ракетный век
В сущности, ученые и инженеры сейчас делают лишь первые шаги на пути к решению задачи машущего полета. Пока эта проблема полностью решена только в природе - у летающих животных. И мы не должны закрывать глаза на все те трудности, с которыми связаны исследования полета птиц и насекомых и выяснение теоретических предпосылок для создания аппаратов с машущими крыльями. Но, располагая теорией машущего полета и накопив достаточный опыт в строительстве орнитоптеров и энтомоптеров, самолетостроители, надо полагать, со временем перейдут к созданию "большой махолетной авиации". В ней, несомненно, будет использован весь арсенал разнообразных и замечательных свойств, присущих летательному аппарату насекомых и птиц, начиная от тонкого управления полетом и кончая способностью их крыльев одновременно создавать тягу и подъемную силу. Фюзеляжи будущих транспортных и пассажирских махолетов, вероятно, будут сделаны из легкой и термостойкой пластмассы, по прочности не уступающей лучшим сортам стали; крылья, очевидно, будут изготовлены из стеклопластика или дюраля с легкой обтяжкой, по своим характеристикам приближающимся к материалам "одежды", в которую природа облачила пернатых летунов и насекомых. Из чего именно будет сделана такая обтяжка, пока трудно сказать. Очень может быть, что поначалу для этих целей строители махолетов используют уже известную нам легкую оболочку типа "ламинфло", имитирующую по своим свойствам чудесную антитурбулентную и гидрофобную кожу дельфинов. Что касается выбора источников энергии для будущих махолетов, то здесь, надо полагать, подойдут любые двигатели, вплоть до атомных, если их удастся сделать достаточно легкими.
Такие махолеты будут поднимать (на единицу мощности) больше грузов и пассажиров, стоить они будут значительно дешевле нынешних самолетов (как винтовых, так и реактивных). Можно предположить, что будут созданы и многокрылые махолеты. Несколько "асинхронных" пар узких крыльев, несомненно, обеспечат махолету значительно более высокую относительную скорость, чем широкие и короткие крылья орла или летучей мыши. Полет на махолете будет совершенно безопасен, так как машущий полет допускает очень малые, почти "нулевые" скорости. И последнее. При переходе на машущий полет отпадет нужда в строительстве длинных взлетно-посадочных дорожек и дорогостоящих аэродромов.
Рассмотрев все важнейшие аспекты проблемы машущего полета, в заключение необходимо подчеркнуть, что изучение полета птиц и насекомых нельзя считать лишь подсобным методом, призванным облегчить создание летательных аппаратов с машущими крыльями, - оно имеет гораздо большее значение. Даже если бы такие аппараты и не были созданы либо их практическое применение на первых порах оказалось бы недостаточно эффективным, все равно наука останется в выигрыше, так как бионические исследования полета птиц и насекомых (как и вообще механизмов локомоции летающих и плавающих животных) сулят открыть новые страницы в аэро- и гидродинамике.
|
ПОИСК:
|
При копировании ссылка обязательна:
http://biologylib.ru/ 'Библиотека по биологии'