Проблемы телеметрического изучения ориентации рыб при возвращении их к месту нереста (А. Хаслер, Х. Гендерсон)
В последние годы появился ряд работ, посвященных вопросу ориентации рыб при миграции и возвращении к месту нереста. Не так давно вышла обзорная статья одного из авторов этого доклада [2], посвященная данной проблеме. Мы не ставим себе целью дать обзор работ в этой области, а лишь кратко охарактеризуем некоторые из них, чтобы показать сущность рассматриваемой биологической проблемы и пути использования телеметрической аппаратуры.
Результаты, полученные в 1951 г. Хаслером и Уисби [5], указывали на то, что лосось может возвращаться из устья реки к месту нереста, ориентируясь по запаху, специфичному для течения у места нереста. Однако миграция лосося на большие расстояния оставалась необъяснимой, так как кажется невероятным, чтобы лосось мог улавливать "домашние запахи" далеко в открытом океане.
Лабораторные опыты подкрепили гипотезу об ориентации рыб по солнцу при миграции в открытых водах. Было показано, что можно приучить рыбу ориентироваться по солнцу [3]. Способность рыб учитывать дневное движение солнца свидетельствует о существовании "биологических часов", управляющих этим процессом. Дальнейшие исследования укрепили уверенность в том, что солнце играет важную роль в ориентации рыб [4].
Ориентация белого морского окуня в открытых водах
Наши наблюдения над возвращением белого морского окуня Roccus chrysops к месту нереста проводились в озере Мендота, т. е. в условиях, легко поддающихся изучению. Наша лаборатория расположена в непосредственной близости от этого озера.
Рыбы использовали для нереста два основных района, расположенные на мелких местах у противоположных отлогих берегов небольшого залива, расстояние между которыми составляет около 1,6 км. Залив находится в северо-восточной части озера (фиг. 1). Хотя по сравнению с океаном озеро очень мало (39 км2), кажется невероятным, чтобы рыбы использовали топографические ориентиры при миграции от середины озера к месту нереста. Тем не менее рыбы, выловленные в районе нереста во время сезона метания икры и выпущенные в другой части озера, возвращались обратное ошибкой в расстоянии менее 10%. Это происходило независимо от того, выпускали рыб в центре озера или в другом районе нереста [3, 6].

Фиг. 1. Озеро Мендота. Заштрихованы основные районы нереста белого морского окуня
Метод мечения и ловли не дает достаточной информации о времени, прошедшем между выпуском рыбы и возвращением ее в районе нереста, и поэтому трудно доказать, что возвращение выпущенных рыб есть нечто большее, чем случайный поиск рыбой района нереста. Следовательно, необходимы специальные методы для изучения способности рыбы к ориентации. Мы проверяли два типа таких методов: 1) непрерывное прослеживание, 2) наблюдение за рыбой из одного места в течение некоторого времени после выпуска.
В первых опытах за движением рыбы следили по небольшому поплавку, прикрепленному к ней на проволоке длиной около 3 м. Рыба не могла погрузить поплавок более чем на несколько секунд, что обеспечивало возможность визуального прослеживания. Было проведено около 100 таких опытов. Результаты показали, что рыба, выпускаемая в центре озера, направлялась на север (к району нереста), когда небо было чистым, и выбирала случайные направления, когда небо было покрыто облаками или на глазах у рыбы были колпачки.
Тем не менее мы не были удовлетворены этим методом, так как он обладал тремя существенными недостатками: 1) неестественное для рыбы ограничение, заставляющее ее находиться у поверхности воды, 2) ограниченные пределы видимости поплавка, 3) невозможность работать одновременно с большим числом рыб. Последний недостаток был наиболее существенным, так как белый морской окунь обычно мигрирует косяками.
Для устранения этих недостатков Хоррол [6], работающий в нашей лаборатории, использовал устройство с всплывающим баллоном, которое прикреплялось к рыбе и могло доставить ее на поверхность воды приблизительно через час после выпуска. Баллоны были хорошо видны в бинокль на расстоянии до 100 м. На основании полученных этим методом результатов не удалось установить преимущественного направления ухода рыб, в связи с чем встал вопрос о пригодности этих устройств и о надежности первоначальных данных, полученных методом поплавков.
Мы решили увеличить время слежения за рыбами, так как нам вполне резонно казалось, что с увеличением промежутка времени между выпуском рыбы и ее вторичной поимкой меньше будет сказываться влияние операций, связанных с мечением рыбы. Правда, вместе с тем это позволяет рыбе пройти большее расстояние.
Для увеличения периода слежения до 3 час был разработан метод, основанный на наблюдении с воздуха. Механизм времени от устройства с баллоном был встроен в трубку меньших размеров, прикрепляемую к рыбе и предназначенную для выпускания окрашивающих воду веществ (фиг. 2). Таблетка, содержащая 100 мг флюоресцирующего вещества, образует пятно, сохраняющееся на поверхности воды от 15 до 45 мин. При полете по заранее заданной координатной сетке на высотах до 300 м можно отмечать положения рыб в моменты выпуска таблеток. За 1 час можно зарядить и прикрепить к рыбам 40 таких трубок, что позволяет наблюдать относительно большое число рыб при некоторой определенной совокупности окружающих условий. Этот метод находится еще в стадии разработки.
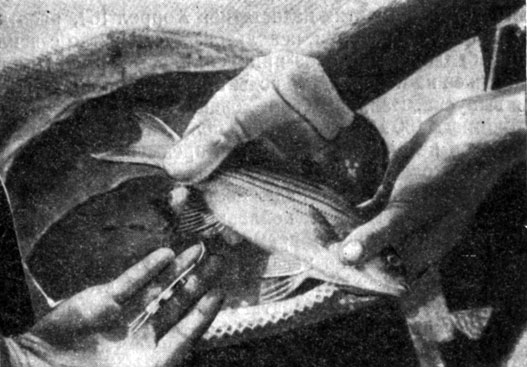
Фиг. 2. Белый морской окунь перед выпуском в воду. Трубка с таблетками флюоресцирующего вещества прикреплялась к анальному плавнику
Проблемы проектирования телеметрических приборов
Описанные выше методы были основаны на относительно высокой прозрачности воздуха для видимой части спектра. Если бы вода была такой же прозрачной, наши задачи были бы намного проще. Но вода почти непрозрачна не только для света, но и для большей части всего электромагнитного спектра. Поэтому точность полученных данных зависела от расстояния между рыбой и поверхностью воды. Наша цель состоит в отыскании метода, который обеспечил бы непосредственное слежение за рыбой.
Хотя поглощение - не единственный источник потерь энергии в телеметрической системе, поглощение водой различных видов энергии может служить удобным критерием выбора способов передачи энергии. В настоящем докладе мы будем рассматривать прозрачность воды для света как минимальную прозрачность, еще пригодную при слежении за рыбами. Она характеризуется поглощением около 50% энергии на 1 м толщи воды. По-видимому, для наших целей можно использовать лишь три полосы частот: видимое излучение, радиоволны ниже 5 Мгц и звуковые колебания ниже 175 кгц [1].
Область видимого излучения можно в основном исключить из рассмотрения по трем причинам: 1) пониженная прозрачность многих природных водоемов, 2) невозможность наблюдения днем малых источников света на ярко освещенном фоне, 3) чувствительность самих рыб к свету. Последняя причина не позволяет использовать для ночного слежения малые источники света, прикрепленные к рыбам.
Более предпочтительны радиочастоты ниже 5 Мгц. Особый интерес представляют частоты 200 кгц и ниже, где поглощение становится менее 50% на 1 км. Насколько нам известно, этот диапазон (для передач малых энергий на небольшие расстояния) изучен сравнительно мало. Однако для этих частот эффективная передающая антенна слишком велика, чтобы ее можно было реализовать, и это приводит к необходимости использования сигналов повышенной мощности.
Наиболее перспективна полоса звуковых частот ниже 150 кгц. Но хотя при частотах, лежащих в нижней части этого диапазона, вода проводит звук довольно хорошо, требуемая мощность передатчика кажется большой по сравнению с радиопередачей через воздух. В литературе [9] описан прикрепляемый к рыбе ультразвуковой передатчик, который с успехом использовался для прослеживания крупного лосося в реках [7]. Однако размеры этого прибора (длина 6,4 см, диаметр 2,3 см) не позволяют использовать его для белого морского окуня, который значительно меньше лосося (длина около 275 мм). Радиус действия этих передатчиков (250 м) не дает возможности применить их при изучении миграции лосося в океане.
Мы проводили опыты с различными схемами, пытаясь уменьшить размеры передатчика. К сожалению, нельзя уменьшить самый большой элемент передатчика - батарею - без значительного снижения либо радиуса действия, либо срока службы передатчика. Вообще говоря, обеспечить сигнал для слежения могли бы некоторые очень простые звуковые генераторы (взрывной, с накаливаемой нитью) или различные механические приборы. Однако мы не могли использовать их в наших опытах, так как этому препятствовали либо требуемая мощность, либо размер пускового устройства. Кроме того, эти передатчики могут генерировать звуковые колебания, которые, вероятно, влияют на поведение рыб.
Ограничивающие факторы в телеметрической системе
Хотя мы представляем себе обилие звеньев в телеметрической системе, в первую очередь нас интересуют ограничивающие факторы. Мы полагаем, что наиболее важные, безотлагательные проблемы миниатюризации подводных телеметрических приборов относятся к передающим антеннам и особенно к источникам питания. Так как энергия, излучаемая передатчиком, в значительной степени ограничена размером источника, все три рассмотренные выше полосы частот требуют, вероятно, компромисса между продолжительностью сигнала и его мощностью. Наиболее удобны электрохимические источники, но при их применении необходимы импульсные схемы (для получения необходимых уровней мощности).
Очень удобны элементы магний - хлористое серебро, которые используют в качестве электролита озерную воду и обеспечивают значительное уменьшение размеров источника при заданной мощности тока. Однако общий запас энергии этих элементов сравним с запасом энергии элементов других типов. Если продолжительность сигнала должна быть малой, то при любом методе наблюдения нужны эффективные датчики времени. Насколько нам известно, для диапазона от минут до часов таких приборов требуемых размеров в настоящее время нет.
На основе опыта, полученного при изучении миграции рыб и при конструировании приборов для слежения за рыбами, мы можем предложить следующие критерии оценки систем, предназначенных для слежения:
1. Общий размер прибора, прикрепляемого к рыбе, должен быть таким, чтобы рыба могла проглотить его (независимо от того, прикрепляется ли прибор к рыбе или проглатывается ею).
2. Плотность изготовленного прибора должна быть приблизительно равна плотности воды. Необходимо избежать изменения эффективной плотности датчика при изменении гидростатического давления.
3. Продолжительность работы передатчика должна составлять не менее 6 час. Если передатчик используется при проведении наблюдений в одном месте, то он должен начать работать не ранее чем через 3 час после выпуска рыбы (с точностью 25%).
4. Радиус действия передатчика должен быть не менее 1 км при портативном приемнике и 10 км при стационарном приемнике.
Мы понимаем, что эти критерии применимы лишь на данном этапе исследований и не являются абсолютными требованиями. В связи с этим нас интересуют любые идеи улучшения используемых приборов. Мы пытаемся также собрать информацию о возвращении к месту нереста крупных рыб; в этом случае ограничения, накладываемые на размеры датчиков, менее строги, чем в опытах с белым морским окунем.
Литература
1. Dorsey E. N., Properties of ordinary water-substance, Reinhold, New York, 1940.
2. Hasler A. D., Homing orientation in migrating fishes., Ergebn. Biol., 23, 94-115 (1960).
3. Hasler A. D., Horrall R. M., Wisby W. J., Braemer W., Sun-orientation and homing in fisches, Limnol. Oceanogr., 3, 353-361 (1958).
4. Hasler A. D., Schwassmann H. О., Sun orientation of fish at different latitudes, Cold Spring Harbor Symp. on Quant. Biol., 25, 429-441 (1960).
5. Hasler A. D., Wisby W. J., Discrimination of stream odors by fishes and its relation to parent stream behavior, Amer. Naturalist, 85 (823), 223-238 (1951).
6. Horrall R. M., A comparative study of two spawning populations of the white bass, Roccus chrysops (Rafinesque), in Lake Mendota, Wisconsin, with special reference to homing behavior. PhD thesis, University of Wisconsin, 1961.
7. Johnson J. H., Sonic tracking of adult salmon at Bonnevile Dam., 1957, Fishery Bull., 176. U. S. Fish and Wildlife Service, 60, 471-485 (1960).
8. Schwassmann H. O., Experiments on sun orienation in some freshwater fish, Ph. D. Thesis, University of Wisconsin, 1962.
9. Trefethen R. S., Dudley J. W., Smith M. R., Ultrasonic tracer follows tagged fiscn., Electronics, 30 (4), 156-160 (1957).
|
ПОИСК:
|
При копировании ссылка обязательна:
http://biologylib.ru/ 'Библиотека по биологии'