Часть IV. Применение телеметрии при изучении поведения животных в сообществе
Наблюдение и регистрация поведения животных в программируемой обстановке (Дж. Финдли)
В течение последних нескольких лет я занимался конструированием экспериментальной обстановки, в которой животные должны жить постоянно, удовлетворяя большую часть своих биологических потребностей в соответствии с различными программами поведения, вводимыми в эту физическую среду. Обычно, если такая среда строится для одной особи, мы сталкиваемся со значительно меньшими трудностями, чем в случае совместного обитания многих животных, так как в последнем случае мы не только должны программировать экспериментальные условия для каждого организма, но и сталкиваемся с проблемой идентификации особей. Как правило, в экспериментах такого рода собака, павиан или шимпанзе живут в специальной камере, в которой имеются приспособления для подачи пищи, воды и других видов поощрения. Кроме того, там имеются различные механизмы, связанные с автоматическим осуществлением программы. Это оборудование позволяет предъявлять к поведению животного различные требования, удовлетворяя которые, животное получает вознаграждение.
Мой подход к экспериментальному исследованию поведения нескольких животных заключался, во-первых, в создании физической среды, состоящей из связанных между собой камер, и, во-вторых, в программировании условий перехода животных из камеры в камеру и требований, предъявляемых к поведению животного внутри каждой камеры. Ниже мне хотелось бы описать два таких эксперимента и показать, каким образом применение простой телеметрической аппаратуры может существенно помочь в каждой из операций.
Многокамерное устройство для собак
В течение примерно двух лет две дворняжки постоянно жили в многокамерном устройстве, где для получения пищи и воды и выхода на прогулку они должны были выполнять различные экспериментальные задачи.
На фиг. 1 изображен план такого устройства. Если обе собаки находились в камере А, то каждая собака могла попасть в камеру В, проходя через незапертую, электрически управляемую дверь, открывавшуюся в одну сторону. Как только собака попадала в камеру В, дверь запиралась и для перехода в камеру С от собаки требовалось нажать на простой рычажок. В камере С собака уже могла выполнять экспериментальные задачи для получения пищи, воды или прогулки. В последнем случае собака просто должна была отпереть дверь, ведущую из камеры. Экспериментальная установка позволяла двум собакам быть вместе за пределами помещения или в камере А, и, кроме того, к каждой собаке в отдельности могли быть предъявлены различные требования, выполнение которых открывало доступ в камеры В и С. Для автоматической регистрации данных и программирования экспериментальных требований к каждой собаке нужно было уметь обнаруживать присутствие собак в камере В и идентифицировать их. Это условие удовлетворялось с помощью небольшого генератора низкой частоты, прикрепленного к шее одной из собак, сигнал от которого при попадании собаки в камеру В поступал в приемник и подключенное к нему реле. Так как при попадании каждой собаки в камеру В на двери замыкался переключатель, то комбинация такого переключения с наличием или отсутствием сигнала позволяла идентифицировать ту собаку, которая на самом деле вошла в камеру В. Приемная антенна, настроенная на частоту 550 кгц, состояла просто из рамки, проходящей по контуру двери изнутри камеры В. Хотя применение телеметрии в этой экспериментальной ситуации было относительно простым, оно полностью решало задачу дифференцированного управления поведением каждой собаки.
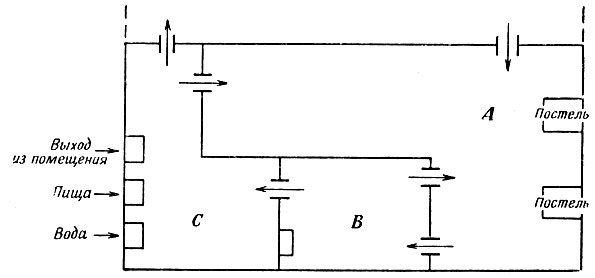
Фиг. 1. План многокамерного устройства для опытов с собаками
Экспериментальная многокамерная установка и телеметрическая система для изучения поведения шимпанзе
Относительная простота телеметрической системы, использованной в описанном выше эксперименте с собаками, была связана в основном с эффективным использованием ведущих в одном направлении дверей. Однако при работе с шимпанзе эта конструкция стала непрактичной, в связи с чем было принято решение добиться нужного управления с помощью более сложной телеметрической системы.
На фиг. 2, А изображен план экспериментальной установки. Два шимпанзе постоянно жили в трех комнатах, соединенных друг с другом посредством электрически запираемых дверок. Шимпанзе мог пройти через такую незапертую дверку, подняв ее и затем опустив. С каждой дверкой соединялся механический выключатель, указывающий на опущенное положение двери. В каждой из трех комнат над каждой из дверей устанавливалась пара рамочных антенн, настроенных на сигналы низкой частоты, поступающие из передатчика с кварцевой стабилизацией, укрепленного на шее каждого шимпанзе.
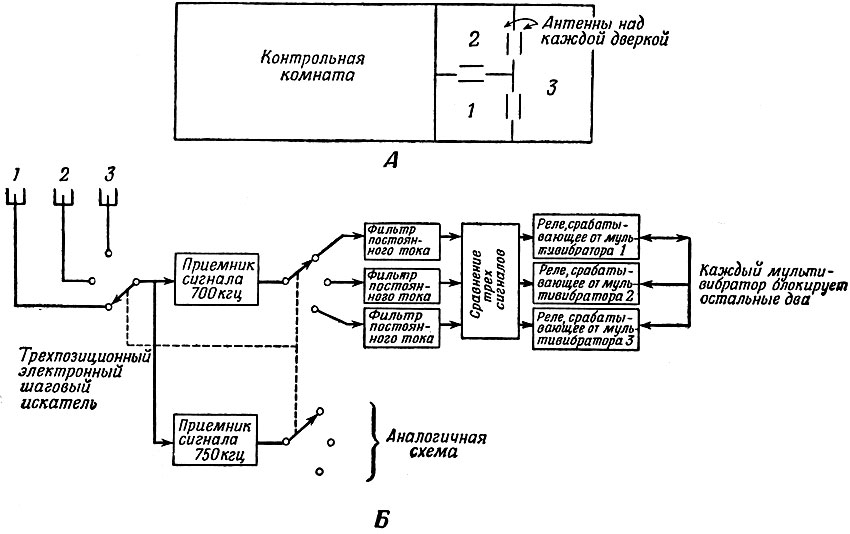
Фиг. 2. План помещения (А) и система запирания дверей (Б) для опытов с шимпанзе
В экспериментах требовалось, чтобы шимпанзе находились вместе только в комнате 3, которая служила им местом общения. Переход из комнаты 3 в комнату 1 разрешался только в том случае, если шимпанзе взвешивался на электронных весах в комнате 3. Удовлетворительно проведенное взвешивание отпирало двери между комнатами 1 и 3. После того как один из шимпанзе входил в комнату 1 и опускал дверку, последняя автоматически запиралась. В комнате 1 шимпанзе должен был выполнить сложную задачу на счет и время, при успешном решении которой отпиралась дверка в комнату 2. Тут шимпанзе мог получить пищу (в виде пилюль), воду, сок и другие вознаграждения. После этого шимпанзе разрешали перейти в комнату 3. Как только оба шимпанзе оказывались в комнате 3, можно было повторить описанную последовательность событий.
Эта программа поведения осуществлялась с помощью системы обнаружения, схема которой частично показана на фиг. 2, Б. Эта система работала следующим образом. Сигналы, принятые антеннами из каждой комнаты, передавались в электронный шаговый искатель, который быстро обегал три позиции, соответствующие трем комнатам. Затем эти сигналы проходили через приемники и цепочку дифференциальных усилителей, которые использовались для обнаружения комнаты с наибольшей мощностью сигнала, что позволяло по выходу реле локализировать местонахождение каждого из шимпанзе. После обследования данной комнаты можно было бы по показаниям реле установить, находится ли в ней тот или другой шимпанзе, оба вместе или нет ни одного.
На основе этой информации дверки автоматически открывались и закрывались в зависимости от выполнения животными программы опытов. Таким образом, эта система обнаружения использовалась не только с целью простой регистрации движений каждого шимпанзе, но и для контроля их переходов из комнаты в комнату. Для программирования поведения животных в пределах каждой комнаты использовались обычные релейно-переключательные схемы и цепи синхронизации.
Таким образом, с помощью относительно простых телеметрических систем удалось создать для собак и шимпанзе такую экспериментальную обстановку, которая позволяла не только проводить опыты в любое время суток, но и осуществлять контроль над индивидуальным поведением одного или более животных. В ближайшем будущем телеметрические методы контроля и программирования экспериментов по поведению найдут, вероятно, самое широкое применение.
|
ПОИСК:
|
При копировании ссылка обязательна:
http://biologylib.ru/ 'Библиотека по биологии'