Возможности использования телеметрии при изучении сигнализации морских животных (У. Ивенс, У. Сэзерленд)
Основной предпосылкой к изучению звуковой связи между животными является возможность одновременного наблюдения поведения и сопутствующей ему звуковой сигнализации. Для большинства животных осуществить такое одновременное наблюдение очень трудно, особенно если нас интересуют морские животные. В естественных морских местообитаниях непрозрачность воды существенно ограничивает возможность визуального наблюдения. Вместе с тем в океанах, озерах и реках звуки, подлежащие изучению, маскируются сплошным хаосом посторонних звуков. К тому же многие морские животные чрезвычайно подвижны, что приводит к необходимости постоянного перемещения наблюдателя и используемой им аппаратуры.
С 1959 г. компания "Локхид Калифорния" активно участвовала в изучении звуковой сигнализации и поведения китообразных, в основном дельфинов.
Эта программа проводилась в бассейнах Тихоокеанского океанариума в Мэринленде и в калифорнийских и мексиканских водах, где с помощью исследовательского судна "Си Квест" велись наблюдения над дельфинами. При изучении общения между дельфинами в бассейнах, которым мы занимаемся в настоящее время, телеметрия не применялась. Наблюдения велись над группами из 2-9 афалин (Turslops truncatus), помещенных в бетонный бассейн диаметром около 9 м и глубиной около 1,2 м. Видимость обычно не вызывала затруднений. Использовались гидрофоны с одинаковыми амплитудами выходных сигналов в диапазоне от 3 гц до 75 кгц в сочетании с системами усиления и записи сигналов. Одна из блок-схем для регистрации информации представлена на фиг. 1. Дополнительную информацию дает использование методов фотографии; существенное значение имело также наличие опытных наблюдателей.
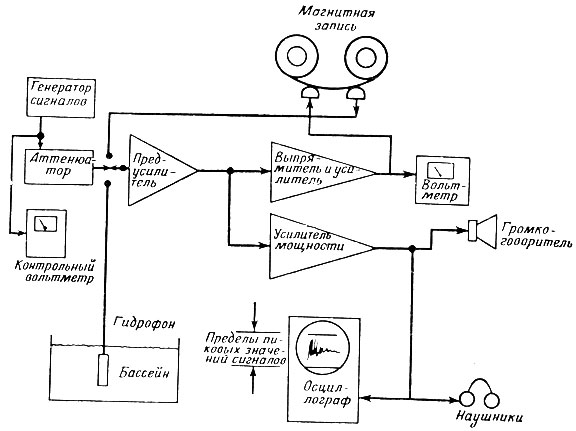
Фиг. 1. Блок-схема прибора для регистрации данных при работе с дельфинами
Вообще говоря, такой подход обеспечил получение весьма ценных данных, но возможности его ограничены. Одна из главных трудностей состоит в определении очередности приема сигналов от различных дельфинов в группе. Для того чтобы определить информационное значение произведенных звуков, необходимо выяснить, какое влияние звуки, издаваемые одним животным, производят на другое животное. Но из-за отражающих свойств стенок обычных бассейнов и ненаправленных характеристик большинства гидрофонов осуществить это трудно. Обратившись к телеметрии, можно найти несколько решений этой проблемы.
При изучении дельфинов и китов в естественных условиях главная трудность связана с визуальным наблюдением. Акустическое наблюдение в большинстве случаев позволяет получить необходимые данные. Однако определить животное, издающее звук, и его поведение почти невозможно, особенно тогда, когда исследователь имеет дело с группами дельфинов нескольких видов. Даже имея в распоряжении исследовательское судно длиной 15 м, работающее в море бесшумно, очень трудно достаточно близко подплыть к группе животных и получить тем самым хорошие условия для визуального наблюдения.
Учитывая все эти проблемы, для изучения Совместного поведения дельфинов и их звуковой сигнализации как в бассейне, так и в естественных условиях, было решено использовать методы телеметрии. Работая с пойманными животными, экспериментатор получает возможность использовать 1 современные радиопередатчики, эффективные на близких расстояниях независимо от малой проницаемости воды для электромагнитных волн.
Телеметрическая аппаратура, разработанная для наблюдения пойманных животных, состоит из прикрепляемого к животному передатчику и системы приема, регистрации и анализа данных. Поведение животных регистрируется телевизионной камерой и синхронизируется с системой, записывающей звук. В идеале для каждого наблюдаемого животного нужно выделить отдельный канал связи. На фиг. 2 и 3 показаны общая схема этого процесса и блок-схема необходимой экспериментальной аппаратуры.
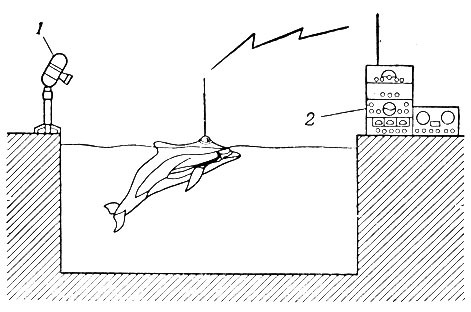
Фиг. 2. Схема телесвязи с пойманным животным. 1 - телевизионная камера; 2 - система приема, анализа и регистрации данных
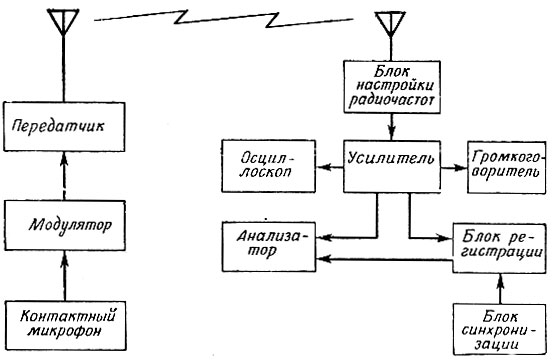
Фиг. 3. Блок-схема телесвязи между животным и аппаратурой
Передающая часть системы состоит из модифицированного передатчика с частотой 27 Мгц с необходимым источником питания и усилительными каскадами. Все это запаковывается в латексовый резиновый колпачок, подобный тем, которыми пользовались Норрис и Прескотт* в опытах с выключением зрения у бурых дельфинов (фиг. 4). Сначала мы будем проводить опыты с контактным микрофоном, хотя впоследствии собираемся работать с несколькими разными типами датчиков.
* (Norris K. S., Prescott J. Н., Asa-Dorian Р. V., Perkins Р., An Experimental Demonstration of Echolocation Behavior in the Porpoise Tursiops truncatus (Montagu), Biological Bulletin, 120 (2), 163-176.)
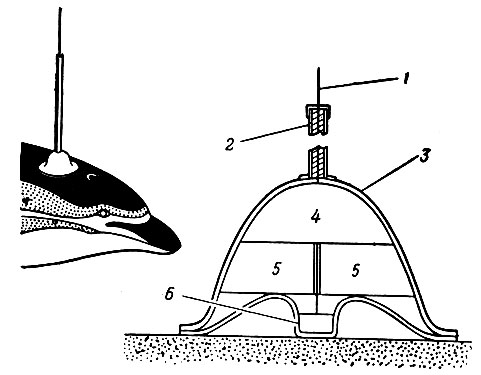
Фиг. 4. Передатчик, укрепляемый на дельфине. 1 - антенна; 2 - коаксиальное покрытие; 3 - латексовый резиновый колпачок; 4 - усилитель-передатчик; 5 - источник питания; 6 - датчик
Диапазон частот контактного микрофона далеко отстоит от диапазона звуков, издаваемых большинством дельфинов (100-150 гц), но доступность этой аппаратуры и простота монтажа позволяют использовать ее в предварительных испытаниях системы. В современных моделях следует использовать датчик с более широкой полосой пропускания, причем выходная амплитуда должна оставаться постоянной (с точностью до ±2 дб) по крайней мере в диапазоне от 200 гц до 30 кгц.
При проведении экспериментов не в бассейнах, а в открытом море, возникает ряд новых проблем. В море едва ли целесообразно прикреплять к животному передатчик. Это привело бы к необходимости поймать и затем выпустить животное или прибегнуть к помощи гарпуна. Во всяком случае, даже если экспериментатор вообще не потеряет аппаратуру и (или) животное, эта процедура, по-видимому, может значительно повлиять на регистрируемые данные. Чтобы избежать этого и вместе с тем иметь возможность использовать современную высококачественную аппаратуру и обеспечить максимальную мобильность, была предложена идея создания небольшой (до 5 м) лодки-платформы со всей необходимой аппаратурой, обладающей хорошей маневренностью, но без человека на борту (мы назвали такое судно "Моби Дик"). Это судно могло бы конструироваться на основе катамарана с дистанционным управлением, способного близко подходить к стадам китов любого размера. Предполагается, что глубокий киль и двойной корпус катамарана (фиг. 5) придадут судну устойчивость - качество, необходимое для того, чтобы судно не перевернулось в случае проявления чрезмерного любопытства со стороны кита. Конструкция киля должна обеспечить расположение в нем подводной телевизионной камеры, кинокамеры и гидрофонов. Выходные импульсы с датчиков должны усиливаться и направляться в соответствующие передатчики на радиочастотах; сигналы этих передатчиков будут приняты и записаны на корабле-базе.
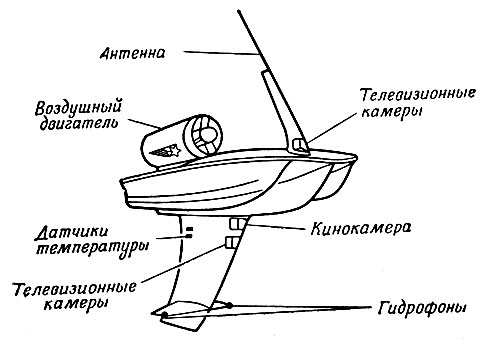
Фиг. 5. Исследовательский катамаран, управляемый по радио
Показанный на фиг. 5 воздушный двигатель, обеспечивающий поступательное движение системы, был выбран по следующим двум основным причинам: 1) работа такого двигателя вызывает в воде лишь незначительные акустические возмущения; 2) отсутствует турбулентность воды, которая имеет место при работе водяных винтов. Кроме того, такая система обладает хорошей маневренностью и ее вибрации не передаются всему судну.
На фиг. 6 показана схема двух каналов передачи информации между "Моби Диком" и базой. По первому каналу с катамарана на базу передаются акустические сигналы и видеосигналы, а также такие данные, как температура. По второму каналу с базы на "Моби Дик" передаются команды, управляющие движением судна и системой получения данных. В идеале такая система обеспечила бы дистанционное управление в диапазоне 8 км, максимальную скорость 15 узлов, рабочую скорость 5-7 узлов, 12-часовой рабочий цикл, возможность проводить наблюдения при волнении на море до 2 баллов. Этот метод позволил бы получить данные, которые нельзя зарегистрировать ни одним из известных сейчас методов и поэтому представляет большую ценность, хотя результаты всегда будут зависеть от реакции животных на судно и от последовательности команд управления в ответ на эту реакцию.
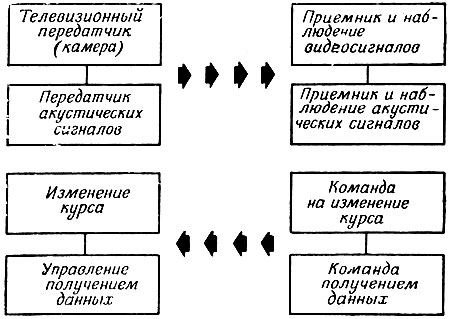
Фиг. 6. Блок-схема радиосвязи между катамараном и базой
Обсуждение доклада
Джеддес. М-р Ивенс рассказывал мне как-то о тех звуках, которые производят дельфины. Я думаю, это важный вопрос. Может быть, м-р Ивенс повторит нашу беседу, хотя бы частично?
Ивенс. Мы столкнулись с большими трудностями при выборе передатчика. Наблюдаемые нами звуки делятся на два типа. Звуки первого типа имеют очень короткую продолжительность, но широкую полосу частот (0,1 кгц-100 кгц). Животное пользуется ими для эхо-локации. Звуки другого типа можно назвать свистом (диапазон частот от 200 гц до 16 кгц). Все эти сигналы могут исходить от одного дельфина. Таким образом, мы работаем с животным, которое обладает способностью издавать звуки любой частоты в диапазоне от 100 гц или ниже до 150 кгц с динамическим диапазоном в 60 дб. Поэтому регистрация данных связана со значительными трудностями.
Маккей. Существуют гидрофоны, охватывающие весь диапазон частот. Не знаю, есть ли они в каталогах, но если вы поищете, то найдете что-нибудь в этом роде в сообщениях о новых приборах.
Ивенс. У нас есть подобные гидрофоны. В нетелеметрической системе использование широкого диапазона не представляет трудностей, и то же будет при работе с "Моби Диком". Основная проблема возникает при работе с животными в бассейнах, где мы хотим помещать передатчик на животное и передавать звуки непосредственно с него.
Маккей. Эти передатчики не должны быть очень велики. У них нет резонансных частот и нет узкой полосы пропускания. Поэтому их также можно поместить в маленькую капсулу.
Шмитт. Сотрудники Кистлера работают с кварцевым датчиком, который нетрудно достать. Я думаю, что датчик давления, о котором вы недавно говорили, работал бы прекрасно.
Маккей. Этот датчик не что иное, как кристалл кварца, введенный в цепь электрометрической лампы.
|
ПОИСК:
|
При копировании ссылка обязательна:
http://biologylib.ru/ 'Библиотека по биологии'